
La aviación moderna ha experimentado una transformación radical gracias a la integración de sistemas digitales avanzados, que han hecho los vuelos más seguros, eficientes y cómodos. En el núcleo de esta evolución se encuentra la programación, una herramienta clave que ha permitido reemplazar los antiguos controles mecánicos con sistemas automatizados de alta precisión.
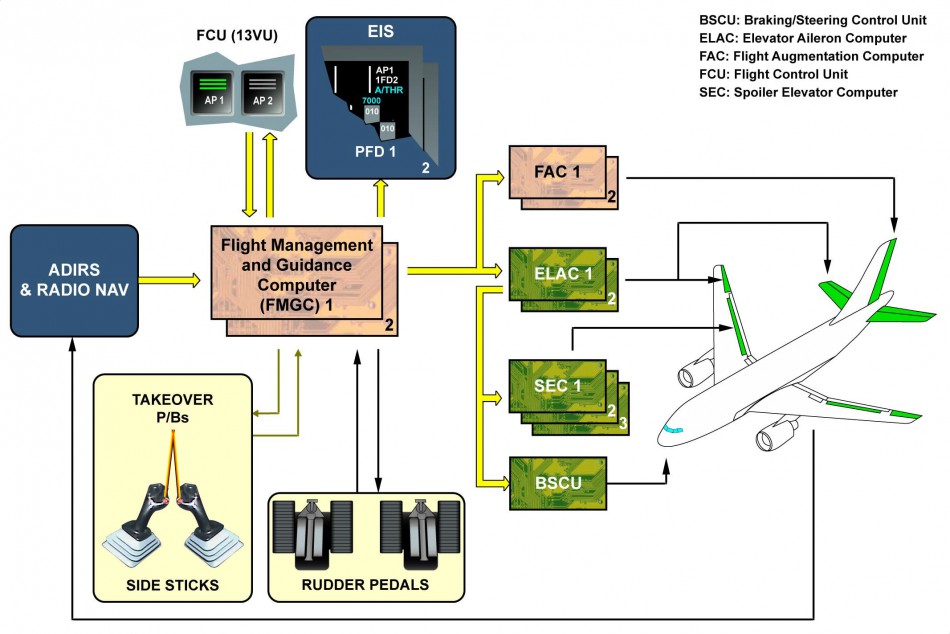
Tecnologías como el Fly-by-Wire han revolucionado el control de aeronaves al sustituir cables y poleas por redes electrónicas que procesan en tiempo real las instrucciones del piloto, optimizando cada maniobra y añadiendo capas críticas de seguridad. Pero estos avances no se limitan al control de vuelo. Sistemas como los radares meteorológicos, los sistemas de prevención de colisiones (TCAS) y los sistemas de gestión de vuelo (FMS) utilizan algoritmos avanzados para gestionar el tráfico aéreo, optimizar rutas y prevenir accidentes.
En este artículo, exploraremos cómo la programación ha transformado la aviación moderna, analizando los sistemas más importantes, desde los controles digitales hasta los algoritmos que hacen posibles los aterrizajes automáticos. Veremos cómo estas innovaciones no solo mejoran la experiencia de vuelo, sino que también redefinen los estándares de seguridad y eficiencia en una de las industrias más tecnológicamente avanzadas del mundo.
Fly-by-Wire (FBW)
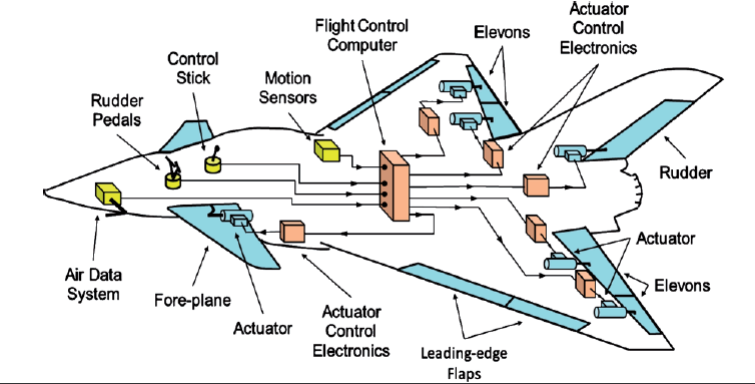
Tradicionalmente, las aeronaves dependían de controles mecánicos e hidráulicos para transmitir las órdenes del piloto a las superficies de control, como los alerones, el timón y los elevadores. Este sistema requería una red compleja de cables, poleas y actuadores hidráulicos, que era pesada, costosa de mantener y menos precisa.
Con el avance de la tecnología, el Fly-by-Wire (FBW) ha revolucionado el control de vuelo al sustituir estos sistemas mecánicos con una red digital gestionada por ordenadores.
El FBW convierte las entradas físicas del piloto en señales electrónicas, que luego son interpretadas y ejecutadas por avanzados sistemas informáticos. Este enfoque no solo reduce el peso y la complejidad, sino que también introduce capacidades avanzadas de control y seguridad que no eran posibles con los sistemas mecánicos tradicionales.
¿Cómo funciona el Fly-By-Wire?
Sensores y Actuadores
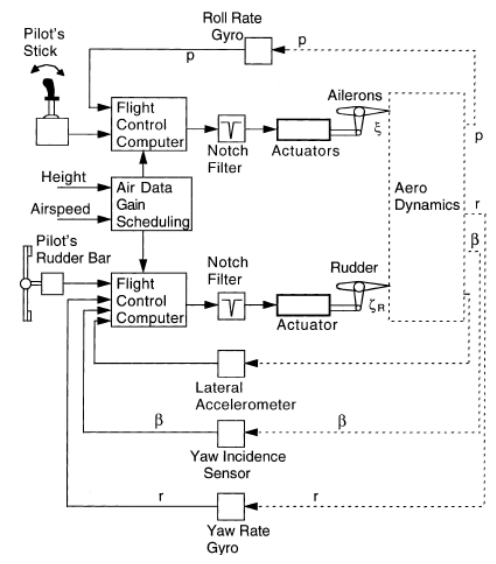
El sistema Fly-by-Wire opera como un intermediario digital entre el piloto y las superficies de control del avión:
- Sensores de Entrada:
- Los sensores en el control de mando (
yoke,sidestickopedales) miden la magnitud y dirección de las fuerzas aplicadas por el piloto. - Estas señales analógicas se convierten en señales digitales mediante convertidores analógico-digitales (
ADC).
- Los sensores en el control de mando (
- Ordenadores de Control de Vuelo (
FCC):- Las señales digitales del piloto se envían a varios ordenadores de control de vuelo (
FCC), encargados de interpretar estas instrucciones y compararlas con los datos del estado del avión (velocidad, altitud, inclinación, etc.). - Los algoritmos dentro de los ordenadores ajustan las entradas del piloto para garantizar un control suave y seguro del avión.
- Las señales digitales del piloto se envían a varios ordenadores de control de vuelo (
- Actuadores Electromecánicos:
- Los ordenadores generan señales de salida que se envían a los actuadores hidráulicos o eléctricos (
Electro-Hydrostatic Actuators,EHA), que mueven físicamente las superficies de control.
- Los ordenadores generan señales de salida que se envían a los actuadores hidráulicos o eléctricos (
- Feedback al piloto:
- Algunos sistemas incluyen retroalimentación háptica, proporcionando al piloto una sensación de resistencia física en el control, simulando los sistemas tradicionales.
Algoritmos de Control y Estabilidad
La programación detrás de Fly-By-Wire utiliza complejos algoritmos de control diseñados para garantizar maniobrabilidad y estabilidad. Algunos de los aspectos técnicos incluyen:
- Modelado Dinámico del Avión:
- Los algoritmos se basan en modelos matemáticos que describen el comportamiento dinámico del avión bajo diferentes condiciones (
carga,velocidad,altitud, etc.).
- Los algoritmos se basan en modelos matemáticos que describen el comportamiento dinámico del avión bajo diferentes condiciones (
- Filtros y Compensadores:
- Los filtros digitales eliminan el ruido de las señales de entrada, mientras que los compensadores ajustan las respuestas del sistema para evitar oscilaciones o movimientos no deseados.
- Control Automático de Estabilidad:
- En muchos aviones modernos, el FBW incluye modos de estabilización automática. Por ejemplo, limita el ángulo de ataque máximo para evitar que el avión entre en pérdida.
- Esto se implementa mediante algoritmos de control en bucle cerrado como PID (
Proporcional-Integral-Derivativo), que corrigen constantemente la posición del avión en tiempo real.
- Protección del Envolvente de Vuelo:
- Los sistemas FBW incluyen protecciones para evitar que el avión opere fuera de sus límites estructurales y aerodinámicos. Por ejemplo:
- Limitaciones en el ángulo de alabeo.
- Prevención de sobrecarga G excesiva.
- Estas protecciones son esenciales para evitar fallos catastróficos, incluso en situaciones en las cuales el error sea del piloto.
- Los sistemas FBW incluyen protecciones para evitar que el avión opere fuera de sus límites estructurales y aerodinámicos. Por ejemplo:
Redundancia y Seguridad
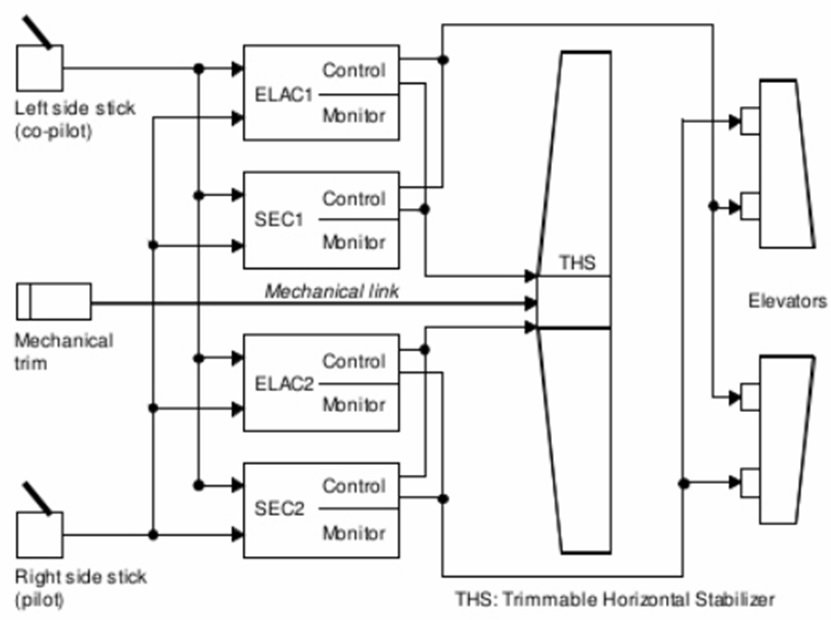
Dado que el FBW reemplaza controles críticos, su diseño se basa en arquitecturas redundantes para garantizar que los posibles fallos no comprometan la seguridad del vuelo.
Diseño Redundante
- Múltiples Ordenadores:
- Un avión moderno puede incluir entre 3 y 5 ordenadores de control de vuelo operando en paralelo.
- Estos ordenadores tienen configuraciones activas y de respaldo, si uno falla, otro toma el control automáticamente.
- Canales Independientes:
- Las señales de entrada y salida se transmiten por múltiples canales separados físicamente para evitar que un fallo único afecte a todo el sistema.
- Sistemas Heterogéneos:
- En algunos aviones, diferentes ordenadores pueden usar hardware o software diferente para minimizar el riesgo de fallo común.
Pruebas y Certificación
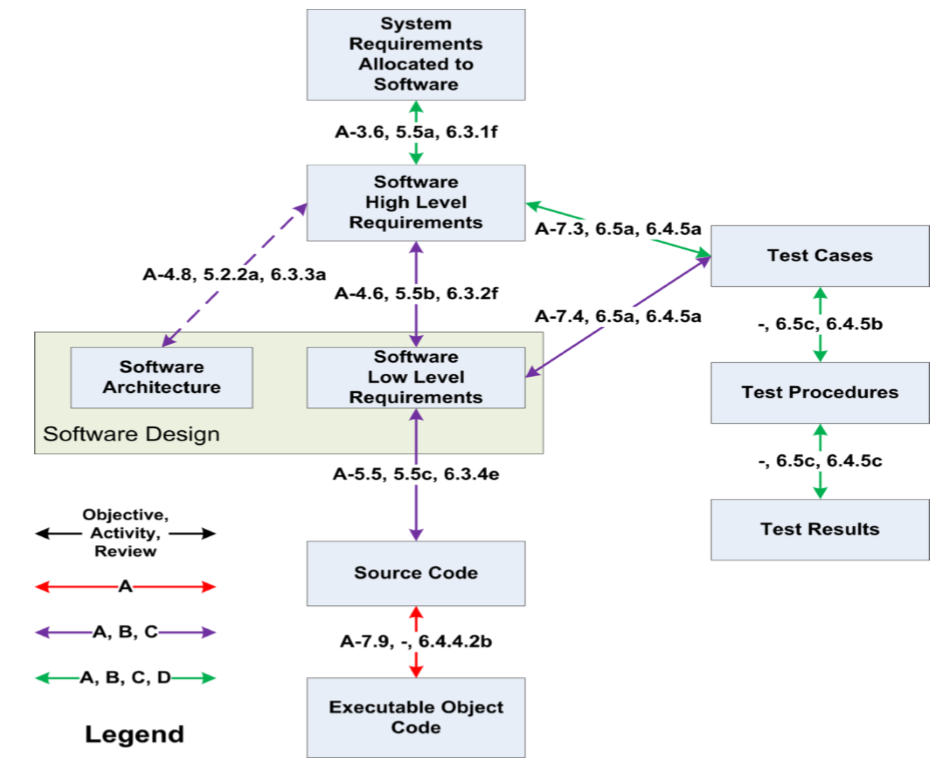
- Los sistemas FBW pasan por rigurosas pruebas de software crítico bajo normativas como DO-178C, que regula el desarrollo y certificación de software aeronáutico.
- Las pruebas incluyen simulaciones de fallos, condiciones extremas y análisis de confiabilidad para garantizar la robustez del sistema.
Ventajas del Fly-By-Wire
- Reducción de Peso y Complejidad:
- Elimina la necesidad de largos cables mecánicos y sistemas hidráulicos pesados.
- Precisión y Eficiencia:
- Permite ajustes milimétricos en las superficies de control, mejorando la eficiencia del vuelo y reduciendo el consumo de combustible.
- Seguridad Mejorada:
- Las protecciones automáticas y la redundancia reducen significativamente el riesgo de accidentes.
- Mantenimiento Simplificado:
- Los sistemas digitales son más fáciles de diagnosticar y reparar que los mecánicos.
Casos Reales de Éxito del Fly-by-Wire

- Airbus A320: Primer Avión Comercial con FBW Total El Airbus A320 fue el primer avión comercial en incorporar Fly-by-Wire como sistema principal de control. Este avance introdujo:
- Protección del Envolvente de Vuelo: Ayudó a evitar maniobras peligrosas por errores humanos.
- Reducción de Peso: Al eliminar sistemas hidráulicos redundantes masivos.
- Vuelo US Airways 1549 (“Milagro en el Hudson”)
- En 2009, el FBW del Airbus A320 fue crucial para ayudar a los pilotos a estabilizar el avión tras la pérdida de ambos motores debido al impacto con aves.
- La protección del envolvente de vuelo permitió al capitán Sullenberger maniobrar con precisión hasta el amerizaje en el río Hudson, salvando a todos los pasajeros.
- Air France 447
- Aunque este accidente resaltó deficiencias humanas y técnicas, el FBW evitó daños mayores al neutralizar entradas erróneas extremas realizadas por los pilotos durante el vuelo.
En el desarrollo del FBW de Airbus, se utilizó
Adapara programar los controladores principales, los cálculos aerodinámicos y las simulaciones de vuelo, esenciales para el desarrollo y prueba del sistema, fueron implementados en lenguajes comoMATLAByFortran, que siguen siendo herramientas clave en la industria aeroespacial.
Flight Management System (FMS)

El Flight Management System (FMS) es uno de los sistemas más sofisticados e importantes de la aviación moderna, considerado el “cerebro” del avión por su capacidad para gestionar múltiples aspectos del vuelo de manera autónoma. Este sistema integra diversas fuentes para garantizar que cada vuelo sea lo más eficiente, seguro y predecible posible.
Funciones Principales del FMS
Los FMS modernos están diseñados utilizando lenguajes como
CyAda, debido a su confiabilidad en sistemas críticos en tiempo real. Estos permiten escribir software que gestiona tareas concurrentes, como el cálculo de rutas y el procesamiento de señales provenientes de múltiples sensores.
El FMS tiene como tarea central la gestión del plan de vuelo, optimizando la ruta, el consumo de combustible y la altitud en tiempo real. Para lograr esto, se basa en varias funciones clave:
- Cálculo de Rutas: El FMS utiliza bases de datos que incluyen aeropuertos, rutas predefinidas (airways) y restricciones de altitud para crear el plan de vuelo más eficiente posible. Este plan incluye todos los puntos de navegación (waypoints) que el avión deberá seguir.
- Gestión de Performance: Durante el vuelo, el FMS supervisa parámetros como el peso del avión, la carga de combustible y las condiciones meteorológicas para ajustar continuamente el plan y mejorar la eficiencia.
- Autonomía Operativa: El sistema puede calcular automáticamente las fases de ascenso, crucero y descenso, ajustando factores como la velocidad y la altitud para adaptarse a las condiciones dinámicas en las distintas fases del vuelo.
Optimización y Algoritmos de Consumo de Combustible

Uno de los aspectos más críticos del FMS es su capacidad para optimizar el consumo de combustible. Los algoritmos avanzados del sistema analizan en tiempo real factores como:
- Condiciones Meteorológicas: Utilizando datos meteorológicos actualizados, el FMS puede evitar zonas de fuerte viento en contra o aprovechar corrientes de aire favorables (jet streams).
- Carga y Peso: Calcula el equilibrio ideal entre velocidad y altitud para el peso actual del avión, maximizando la eficiencia.
- Tráfico Aéreo: Integra restricciones impuestas por los controladores aéreos para encontrar la ruta más corta posible sin comprometer la seguridad.
- Trayectoria 4D: No solo calcula el camino más eficiente en el espacio (3D), sino también el tiempo ideal para llegar a cada waypoint, garantizando un uso óptimo del combustible.
La optimización en tiempo real es posible gracias a técnicas de programación como
la programación linealy el uso de algoritmos heurísticos para encontrar soluciones rápidas en entornos complejos. Además, se implementan sistemas de inteligencia artificial escritos enPythonoC++para predicción meteorológica y análisis de datos históricos.
Integración con GPS y Radares Meteorológicos
El FMS está diseñado para trabajar en conjunto con otros sistemas avanzados como:
- Sistemas de GPS: El FMS utiliza señales GPS para determinar la posición exacta del avión en todo momento. Esto permite ajustar el plan de vuelo en tiempo real con una precisión milimétrica, incluso en condiciones de baja visibilidad.
- Radares Meteorológicos: Estos radares detectan condiciones adversas, como tormentas o turbulencias. El FMS interpreta estos datos y, si es necesario, modifica automáticamente la trayectoria para garantizar un vuelo seguro.
- Sistemas Inerciales (INS): Como respaldo al GPS, los sistemas de navegación inercial permiten al FMS seguir funcionando con precisión durante periodos en los que la señal GPS pueda ser débil o esté bloqueada.
Los FMS dependen de sistemas distribuidos, con software que se ejecuta en múltiples ordenadores de forma paralela. Los lenguajes como
C++son esenciales aquí por su capacidad de manejar comunicación entre sistemas en tiempo real. Además, los protocolos de comunicación, como ARINC 429, son codificados para garantizar interoperabilidad entre sensores, radares y sistemas de navegación.
Ejemplos de Implementación
Los FMS varían entre fabricantes, pero tanto Airbus como Boeing han desarrollado sistemas altamente avanzados que han revolucionado la gestión del vuelo:
- Airbus: El FMS del Airbus A320 incluye capacidades de optimización en tiempo real que ajustan constantemente la altitud y el consumo de combustible según las condiciones del vuelo.
- Boeing: Los sistemas FMS del Boeing 777 y 787 Dreamliner, por ejemplo, están diseñados para largos vuelos intercontinentales, maximizando la eficiencia mediante algoritmos avanzados que tienen en cuenta trayectorias de largo alcance.
En los aviones modernos, los sistemas FMS se ejecutan en hardware embebido con sistemas operativos en tiempo real (RTOS), el código suele estar certificado bajo estándares como DO-178C, que como comentamos antes, regula el desarrollo de software aeronáutico.
Casos Reales de Impacto
El FMS ha demostrado ser una herramienta clave en incidentes y operaciones cotidianas:

- Vuelo United Airlines 232 (1989): Aunque el
FMSno evitó el accidente, fue fundamental en la coordinación de las acciones del piloto para mantener el avión bajo control tras la pérdida de los sistemas hidráulicos. - Optimización Operativa: Durante la pandemia de COVID-19, los
FMSayudaron a las aerolíneas a reducir costos ajustando las rutas y el consumo de combustible, siendo un aliado crucial para sobrevivir en un entorno de bajas operaciones.
Sistemas de Piloto Automático (Autopilot)

El Sistema de Piloto Automático es uno de los mayores avances en la aviación moderna, diseñado para reducir la carga de trabajo de los pilotos. Este sistema puede controlar el avión durante la mayoría de las fases del vuelo, desde el despegue hasta el aterrizaje, dependiendo de la complejidad del modelo. Los pilotos automáticos no reemplazan a los humanos, pero son una herramienta vital para aumentar la eficiencia, la precisión y la seguridad del vuelo.
Cómo Funciona el Piloto Automático
El piloto automático utiliza una combinación de sensores, sistemas de navegación y software para controlar las superficies de vuelo del avión (alerones, elevadores, timones) y mantenerlo en la trayectoria deseada.
Entrada de Datos:
El sistema recibe información en tiempo real de múltiples fuentes, incluyendo:
- Sensores Inerciales: Proveen datos sobre la posición y orientación del avión (acelerómetros y giroscopios).
- GPS y sistema de navegación: Para determinar la posición exacta y ajustar el rumbo.
- Altímetros barométricos: Para mantener una altitud constante.
Control mediante Algoritmos PID:
El núcleo del piloto automático son los algoritmos PID (Proporcional-Integral-Derivativo), un método clásico en la ingeniería de control. Este algoritmo ajusta continuamente las superficies de control del avión basándose en los errores entre las condiciones actuales y los parámetros deseados (como altitud o velocidad).
- Proporcional (P): Corrige desviaciones inmediatamente en proporción al error.
- Integral (I): Ajusta errores acumulados a lo largo del tiempo (para corregir pequeños desvíos persistentes).
- Derivativo (D): Actúa sobre el ritmo de cambio del error para suavizar las correcciones.
Los controladores
PIDsuelen ser programados en lenguajes comoC,C++yPython, especialmente para prototipos y simulaciones. Herramientas comoMATLAB/Simulinkse utilizan ampliamente para modelar y probar estos algoritmos antes de implementarlos en hardware real.
Fases del Vuelo Controladas:
Dependiendo del nivel de automatización, el piloto automático puede realizar tareas como:
- Crucero: Mantener la altitud, velocidad y rumbo especificados por el plan de vuelo.
- Gestión de Rutas: Integrado con el Flight Management System (FMS), ajusta automáticamente la trayectoria según el plan de vuelo preprogramado.
- Aterrizaje Automático: En aeronaves modernas como el Airbus A350 o el Boeing 787, el piloto automático puede realizar aterrizajes de precisión (categoría III), incluso con visibilidad nula.
Escenario de Emergencia
Además de su rol en vuelos rutinarios, el piloto automático puede ser una herramienta crucial en situaciones de emergencia.
- Gestión de Condiciones Meteorológicas Adversas:
- Al integrarse con los radares meteorológicos, el sistema puede ajustar automáticamente la altitud o el rumbo para evitar turbulencias severas o tormentas.
- El software del piloto automático está diseñado para priorizar la estabilidad de la aeronave, ajustando los controles para evitar situaciones críticas como pérdidas de sustentación.
- Sistemas de Alerta de Colisión:
- El piloto automático puede integrarse con el Traffic Collision Avoidance System (
TCAS) para evitar colisiones con otras aeronaves. - En caso de una posible colisión, el sistema ajusta automáticamente la altitud o la trayectoria para mantener una distancia segura, según las recomendaciones del TCAS.
- El piloto automático puede integrarse con el Traffic Collision Avoidance System (
- Desvío Automático:
- En caso de emergencias médicas a bordo o problemas técnicos, el piloto automático puede desviar el avión al aeropuerto más cercano, utiliza datos del
FMS, como el alcance del combustible y las características del aeropuerto, para seleccionar la mejor opción.
- En caso de emergencias médicas a bordo o problemas técnicos, el piloto automático puede desviar el avión al aeropuerto más cercano, utiliza datos del
Los sistemas de piloto automático de emergencia son desarrollados con lenguajes como
Ada, debido a su alta seguridad y resistencia a errores, la programación de sistemasTCASy de navegación avanzada también puede incluirC++, que permite trabajar con hardware de alto rendimiento y baja latencia.
Ejemplos Reales de Implementación
- Autoland en Airbus y Boeing:
- En aviones como el Airbus A350 y el Boeing 787 Dreamliner, el piloto automático puede aterrizar el avión con precisión milimétrica en condiciones de baja visibilidad.
- Estos sistemas están certificados para cumplir con estándares de nuevo, como
DO-178C, que regula el desarrollo de software crítico en la aviación.
- El Caso del Vuelo Qantas 72:
- En 2008, un Airbus A330 sufrió un fallo en su sistema de datos inerciales, el piloto automático, junto con los sistemas
FBW(Fly-By-Wire), ayudó a estabilizar el avión, minimizando el impacto de la situación antes de que los pilotos tomaran el control manual.
- En 2008, un Airbus A330 sufrió un fallo en su sistema de datos inerciales, el piloto automático, junto con los sistemas
Impacto en la Aviación
El piloto automático ha cambiado completamente la forma en la que se opera un avión, no solo reduce la carga de trabajo de los pilotos, sino que también mejora la seguridad y eficiencia del vuelo. En combinación con otros sistemas como el FMS (Flight Management System) y el FBW (Fly-By-Wire), el piloto automático representa la cúspide de la integración entre programación avanzada y aviación moderna.
Sistemas de Alerta y Prevención de Colisiones (TCAS)

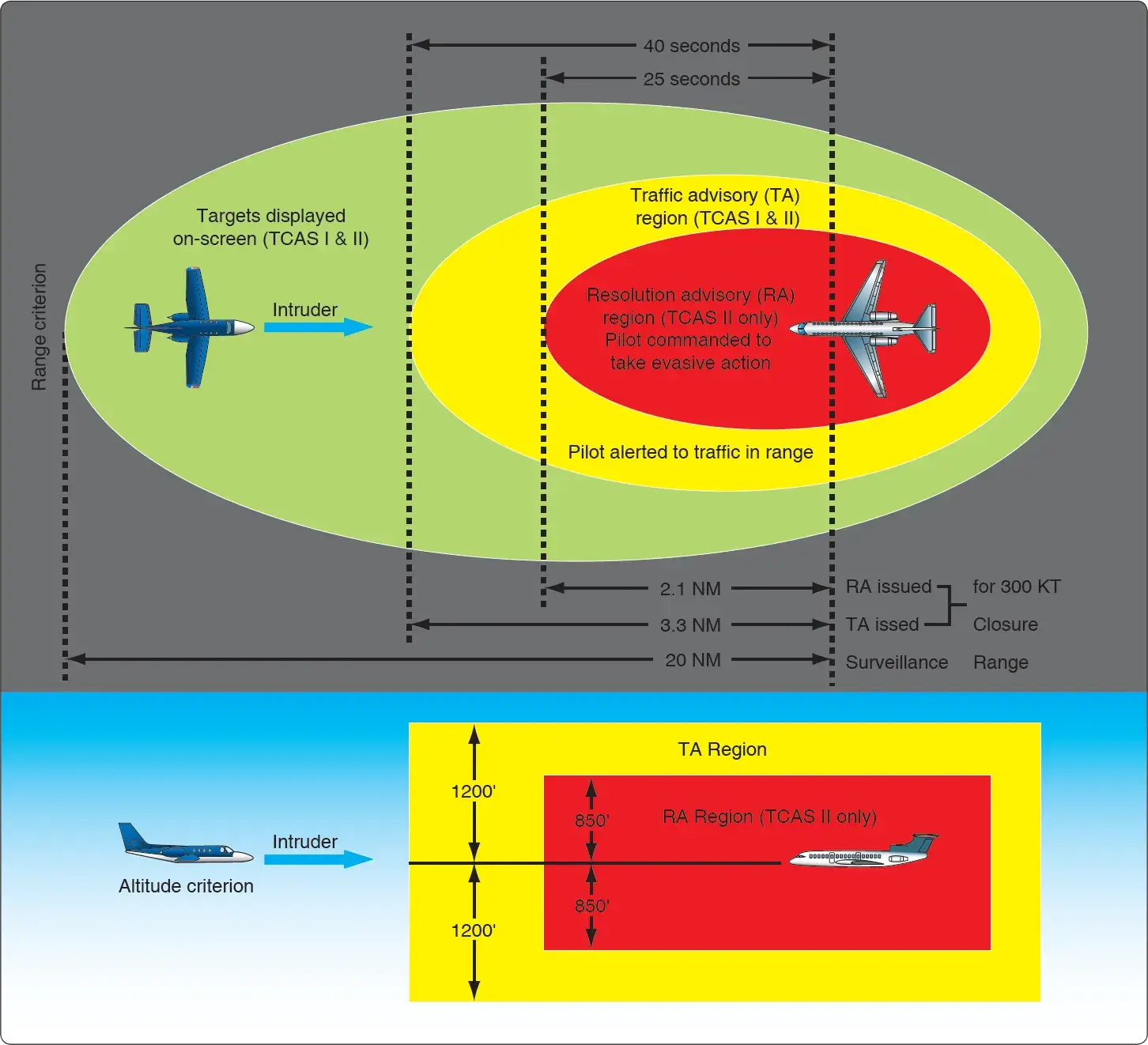
El TCAS (Traffic Collision Avoidance System) es un sistema crucial en la aviación moderna para evitar colisiones en el aire. Utiliza datos de transpondedores y sensores de altitud para identificar aeronaves cercanas que puedan representar una amenaza. El TCAS predice la trayectoria de estos aviones y toma decisiones en tiempo real, proporcionando alertas y recomendaciones al piloto sobre cómo proceder para evitar un choque.
Funcionamiento del TCAS
Sensores y Transpondedores:
El
TCASse basa principalmente en los transpondedores de las aeronaves y radar. Los transpondedores envían información sobre la ubicación, velocidad y altitud de la aeronave a otras aeronaves en su proximidad.- Transpondedor de modo A/C (
Radar Primario y Secundario): Utiliza señales radar para transmitir y recibir información de otras aeronaves. - Transpondedor de modo S (
Radar Secundario): Ofrece una mayor precisión, permitiendo la identificación exacta de las aeronaves cercanas, además de proporcionar información adicional sobre la aeronave.
- Transpondedor de modo A/C (
Algoritmos de Predicción de Colisiones:
Una vez que el
TCASrecibe los datos del transpondedor, utiliza algoritmos de predicción de trayectorias para calcular si hay una posible amenaza de colisión.- Predicción de Trayectorias: El
TCASanaliza los vectores de velocidad y altitud de las aeronaves cercanas y predice su trayectoria a lo largo del tiempo. Si se detecta una posible intersección de estas trayectorias, el sistema genera una alerta. - Manejo de la Prioridad de Evitación: El
TCASasigna una prioridad para la evasión de colisiones, determinando qué aeronave debería maniobrar en caso de una amenaza. Dependiendo de la situación, el sistema indicará al piloto si debe ascender, descender o mantener el curso.
- Predicción de Trayectorias: El
Los algoritmos de predicción y evasión del
TCASrequieren programación en tiempo real y deben ser altamente confiables. Lenguajes comoCyAdason ampliamente utilizados en la programación de estos sistemas debido a su capacidad para manejar operaciones en tiempo real con alta precisión. Además, se usan técnicas de procesamiento de señales y análisis de datos para identificar patrones en los movimientos de otras aeronaves.
Interfaz con el Piloto:
Si el TCAS detecta una posible colisión, genera alertas en la cabina:
- RA (
Resolution Advisory): Una recomendación activa que indica al piloto que realice una maniobra evasiva (ascender o descender) para evitar la colisión. - TA (
Traffic Advisory): Una alerta pasiva que indica la presencia de una aeronave cercana, pero sin necesidad de maniobras evasivas inmediatas.
El piloto recibe estas alertas a través de pantallas en la cabina, que indican la dirección en la que debe maniobrar, ayudando a evitar la colisión sin necesidad de intervención directa de los controladores aéreos.
Desafíos de Sincronización
Uno de los mayores desafíos del TCAS es la sincronización de la información en zonas con varios aviones utilizando el sistema. Esta sincronización es crítica para evitar interferencias y garantizar que las alertas sean precisas y relevantes.
Múltiples Aeronaves en la Mismma Zona:
Cuando varias aeronaves están en las cercanías, pueden estar utilizando el sistema
TCAS, lo que aumenta la complejidad de la gestión de la información. El sistema debe ser capaz de:- Distinguir las aeronaves: El
TCASnecesita identificar cada aeronave individualmente, lo que requiere técnicas avanzadas de filtrado de señales y seguimiento de objetivos. - Sincronización de Alertas: Si dos aeronaves se están aproximando a la misma zona, el sistema debe asegurarse de que las alertas de resolución (
RA) no se solapen, lo que podría causar confusión en los pilotos. ElTCASdebe generar alertas de manera que se minimicen los riesgos de maniobras evasivas conflictivas entre aeronaves.
- Distinguir las aeronaves: El
Interferencia de Señales:
El
TCAStambién debe gestionar las interferencias de señal provenientes de otros sistemas electrónicos a bordo (como el radar o sistemas de comunicación) que podrían afectar la precisión del sistema. Para mitigar estos efectos, se utilizan técnicas de filtrado digital y procesamiento de señales avanzadas.
Los algoritmos que gestionan la sincronización de datos y la resolución de conflictos entre aeronaves cercanas se basan en
programación en tiempo real, los lenguajes más utilizados incluyenCpara la programación de sistemas embebidos yAdapara aplicaciones de alta seguridad, ya que estos lenguajes ofrecen fiabilidad y control de bajo nivel esenciales para evitar fallos, la teoría de sistemas distribuidos y los algoritmos de consenso también se emplean para garantizar que los datos sean sincronizados correctamente entre todas las aeronaves que utilizanTCASen la misma área.
Sistemas de Monitorización de Motores (ECAM/EICAS)
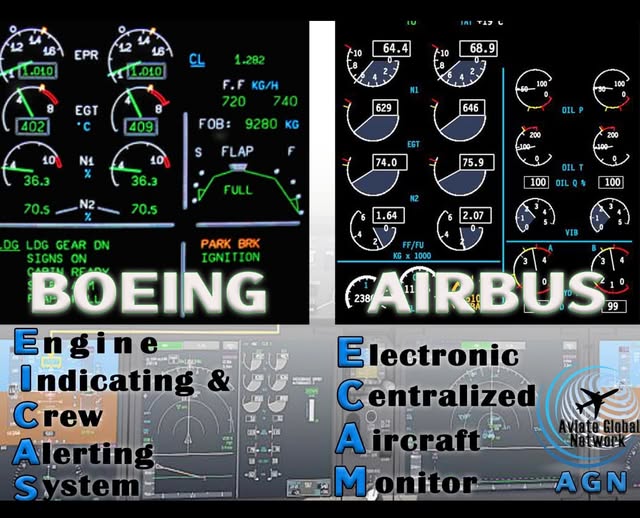
Los sistemas ECAM (Electronic Centralized Aircraft Monitoring) de Airbus y EICAS (Engine Indicating and Crew Alerting System) de Boeing son componentes esenciales en la monitorización de los motores y sistemas del avión. Diseñados para recopilar, analizar y presentar datos en tiempo real, estos sistemas ayudan a los pilotos a tomar decisiones informadas, especialmente en situaciones críticas.
Sensores y Detección de Fallos
Los sistemas ECAM y EICAS recopilan información utilizando una red de sensores distribuidos por toda la aeronave, estos sensores miden una variedad de parámetros, como temperatura, presión, velocidad de rotación y flujo de combustible en los motores.
Adquisición de Datos en Tiempo Real:
Tipos de Sensores: Los sensores analógicos y digitales convierten las mediciones físicas en señales eléctricas. Por ejemplo:
- Termopares para medir la temperatura.
- Sensores de presión para detectar cambios en el flujo de aire o combustible.
Procesamiento de Datos: Los datos recopilados por los sensores se envían a un sistema centralizado, donde se procesan mediante algoritmos en tiempo real para identificar desviaciones o anomalías.
Detección de Fallos Predictiva:
- Mediante técnicas como el análisis de tendencias y modelos de
aprendizaje automático, estos sistemas pueden prever fallos antes de que ocurran. - Por ejemplo, si el sistema detecta un aumento gradual en la vibración de un motor, puede generar una alerta para que la tripulación tome medidas preventivas antes de que se produzca una avería.
- Mediante técnicas como el análisis de tendencias y modelos de
El software que gestiona estos sistemas está escrito en lenguajes como
CoC++, optimizados para operaciones en tiempo real, los algoritmos de detección de fallos a menudo utilizan técnicas de modelado matemático y análisis estadístico para identificar patrones anormales en los datos del sensor. Además, se empleansistemas embebidospara garantizar que las operaciones sean confiables y rápidas.
Alertas en Tiempo Real
Los sistemas ECAM y EICAS no solo recopilan datos, sino que también presentan información clave a la tripulación mediante alertas visuales y sonoras. Estas alertas están diseñadas para priorizar situaciones críticas y garantizar que los pilotos respondan de manera eficiente.
Clasificación de Alertas:
- Alertas Críticas: Como pérdida de potencia en un motor, estas alertas se muestran en rojo, indicando la necesidad de acción inmediata.
- Alertas No Críticas: Incluyen advertencias de mantenimiento o condiciones operativas que no afectan la seguridad inmediata del vuelo.
Interfaz con la Tripulación:
- En aviones Airbus, el
ECAMpresenta información detallada sobre el problema y las acciones correctivas recomendadas directamente en la pantalla. - En aviones Boeing, el
EICASofrece mensajes más resumidos, pero complementados con indicadores en el panel de control.
- En aviones Airbus, el
Caso de Estudio: Vuelo US Airways 1549

El sistema ECAM jugó un papel crucial durante el incidente del vuelo US Airways 1549. Cuando una bandada de aves inutilizó ambos motores, el sistema detectó inmediatamente la pérdida de potencia y proporcionó a la tripulación información clave sobre el estado de los motores. Esto permitió al capitán Chesley “Sully” Sullenberger y a su primer oficial tomar decisiones rápidas, como planear un aterrizaje de emergencia en el río Hudson, salvando la vida de todos a bordo.
La generación de alertas depende de sistemas de software altamente confiables, que utilizan reglas lógicas y sistemas expertos para determinar qué alertas mostrar y cuándo. El diseño de la interfaz con la tripulación (
UI/UX) requiere programación en lenguajes comoAdayPythonpara garantizar que las alertas sean claras, prioritizadas y fáciles de entender bajo presión.
Beneficios de ECAM y EICAS
Prevención de Fallos:
- Identificación temprana de problemas, reduciendo el riesgo de incidentes graves.
Optimización de Mantenimiento:
- Los datos recopilados pueden ser analizados después del vuelo para planificar un mantenimiento preventivo eficiente.
Mejora en la Toma de Decisiones:
- La tripulación recibe información clara y priorizada, mejorando su capacidad para manejar emergencias.
Los Sistemas Eléctricos y su Control Computarizado
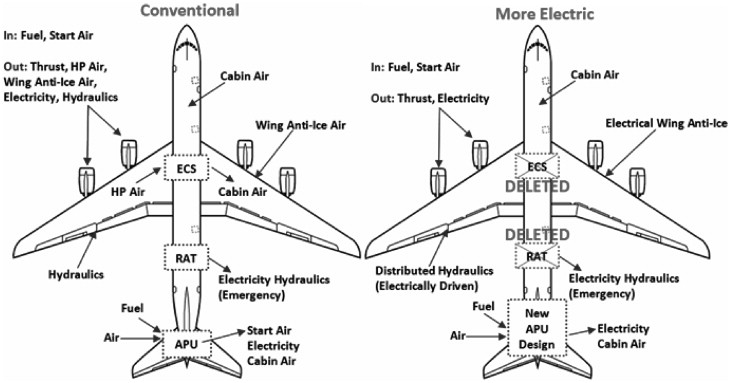
Los sistemas eléctricos de los aviones modernos son fundamentales para el funcionamiento seguro y eficiente de las aeronaves, desde alimentar los motores y sistemas de navegación hasta proporcionar energía a los sistemas de entretenimiento, su gestión precisa y computarizada es clave para garantizar un vuelo exitoso.
Regulación de la Electricidad
La gestión de la energía eléctrica en los aviones modernos es un proceso automatizado, controlado por software embebido que supervisa y distribuye la energía entre generadores, baterías y consumidores de forma eficiente.
Gestión Automatizada:
- Distribución Dinámica de Energía: El software prioriza la energía para sistemas críticos como instrumentos de navegación, comunicaciones y controles de vuelo en caso de una pérdida parcial de energía.
- Supervisión en Tiempo Real: Los datos de sensores eléctricos se procesan continuamente para detectar problemas como sobrecargas o picos de corriente.
Respuesta a Fallos:
- Cuando ocurre un fallo en un generador o en una batería, el sistema conmutará automáticamente a fuentes secundarias de energía.
- Se utilizan algoritmos de control adaptativo para redistribuir la carga entre los generadores restantes o activar fuentes de energía de respaldo, como una unidad de energía auxiliar (
APU).
El software que controla estos sistemas está desarrollado en lenguajes como
CyAda, los cuales son preferidos por su confiabilidad en sistemas críticos. Para tareas de simulación y optimización de energía, se emplean herramientas comoMATLABy algoritmos de control avanzado. Se implementan técnicas de control predictivo basado en modelos (MPC) para anticipar y mitigar posibles interrupciones en la energía.
Redundancia en Sistemas Eléctricos
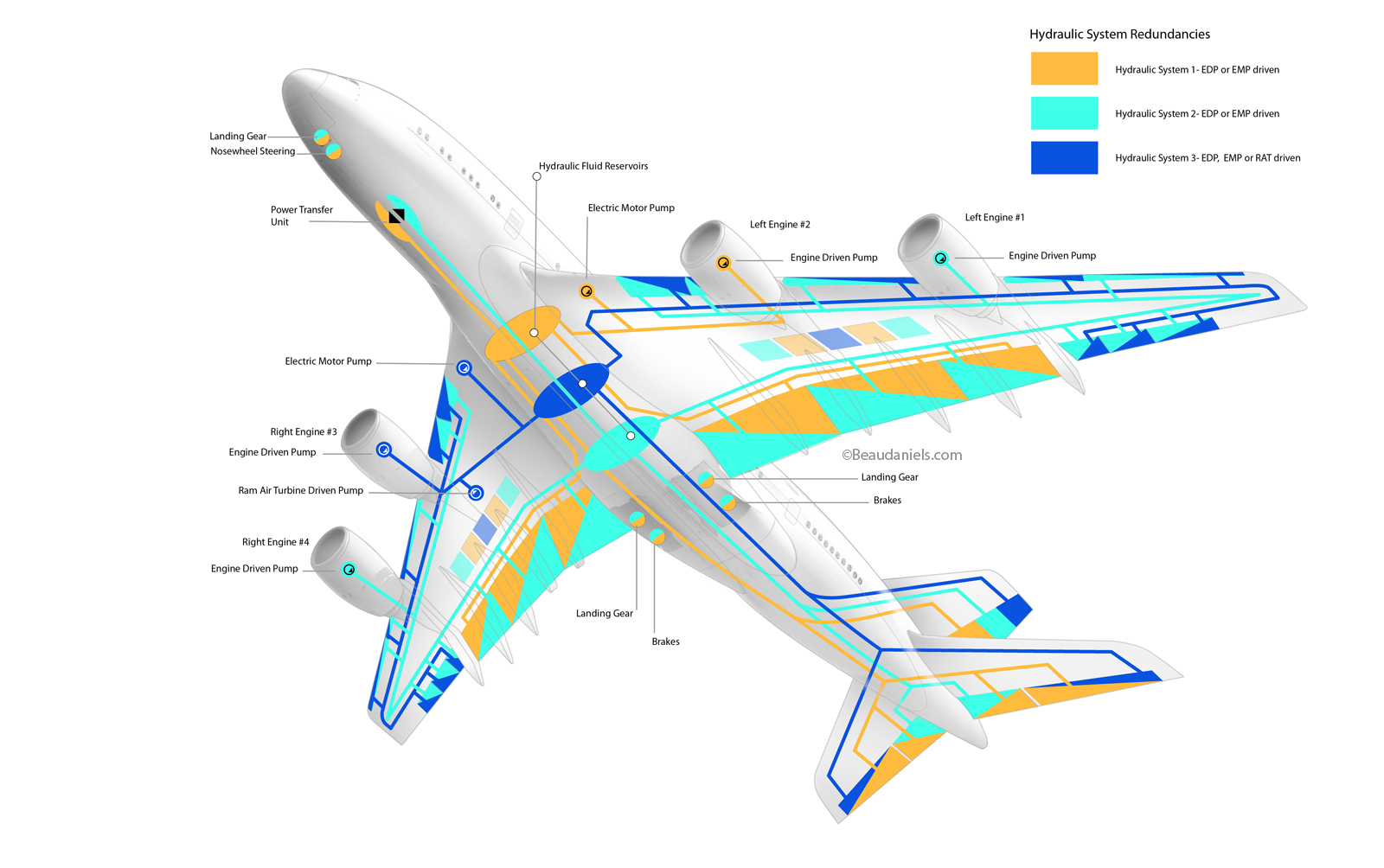
La redundancia es un principio esencial en el diseño de sistemas eléctricos aeronáuticos, dado que un fallo eléctrico puede tener consecuencias catastróficas, los aviones están equipados con múltiples fuentes de energía y sistemas de respaldo.
Redes Eléctricas Duales o Triples:
- Los aviones modernos como el Boeing 787 y el Airbus A350 emplean múltiples redes eléctricas que pueden operar de manera independiente o compartir la carga si una de ellas falla.
Unidades de Energía Auxiliar (
APU):- Estas unidades actúan como una fuente de energía de emergencia, asegurando que los sistemas críticos continúen operando incluso si los generadores principales fallan.
Sistemas de Monitoreo y Diagnóstico:
- Los sistemas eléctricos están equipados con software de diagnóstico que puede identificar fallos en tiempo real y sugerir soluciones a la tripulación. Por ejemplo, si una batería muestra un nivel de carga inusualmente bajo, el sistema puede aislarla automáticamente para evitar que afecte al resto de la red.
Evolución Tecnológica y Aprendizaje de Incidentes Pasados:
- Caso Concorde (2000): El trágico accidente del Concorde subrayó la importancia de la redundancia y supervisión avanzada en los sistemas eléctricos y de combustible.
- Como resultado, los fabricantes han adoptado estrategias de diseño más avanzadas, integrando controladores redundantes y algoritmos más sofisticados para mitigar el riesgo de fallos.
Los sistemas eléctricos redundantes están controlados por sistemas de tiempo real (
RTOS), que permiten respuestas inmediatas a fallos, el desarrollo de estos sistemas utiliza arquitecturas de software distribuidas que emplean canales de comunicación seguros, programados con lenguajes comoC++para garantizar la sincronización de datos entre los diferentes controladores.
Beneficios de los Sistemas Computarizados en la Gestión Eléctrica
Mayor Seguridad:
- La capacidad de respuesta rápida y la redundancia integrada reducen significativamente el riesgo de fallos catastróficos.
Eficiencia Energética:
- Los sistemas modernos optimizan la distribución de energía, reduciendo el consumo y alargando la vida útil de los componentes eléctricos.
Mantenimiento Predictivo:
- La recopilación de datos en tiempo real permite identificar tendencias que podrían conducir a fallos, programando mantenimiento antes de que ocurran problemas.
7. Cabinas de Cristal (Glass Cockpits)

Las cabinas de cristal, conocidas como Glass Cockpits, han revolucionado la forma en que los pilotos interactúan con los sistemas del avión, al sustituir los instrumentos analógicos tradicionales por pantallas digitales multifunción, estas cabinas han mejorado la ergonomía, la eficiencia y la seguridad de los vuelos modernos.
Pantallas Digitales en el Cockpit
Las cabinas de cristal están equipadas con pantallas avanzadas que integran información clave para el vuelo, como:
- Primary Flight Display (
PFD):- Muestra datos críticos como velocidad, altitud, actitud del avión, rumbo y variación vertical.
- Navigation Display (
ND):- Proporciona información sobre la ruta, posición del avión y datos de navegación, como puntos de referencia y aeropuertos cercanos.
- Radar Meteorológico:
- Representa gráficamente condiciones meteorológicas cercanas, alertando sobre turbulencias o tormentas.
- Engine Indication and Crew Alerting System (
EICAS) o Electronic Centralized Aircraft Monitor (ECAM):- Supervisa y muestra el estado de los sistemas del avión, incluidos motores, combustible y sistemas hidráulicos.
Estas pantallas no solo consolidan datos, sino que también se adaptan al contexto del vuelo, resaltando la información más relevante en cada fase, como el despegue, el crucero o el aterrizaje.
Programación de PFD y ND
La programación de las pantallas en las cabinas de cristal es un desafío técnico que requiere garantizar alta precisión, confiabilidad y tiempos de respuesta en tiempo real.
Lenguajes de Programación Utilizados:
Ada:- Ampliamente utilizado en sistemas críticos por su capacidad de manejar errores y garantizar la integridad de los datos.
- Ideal para las pantallas
PFDyND, donde un fallo en la visualización podría comprometer la seguridad del vuelo.
C++:- Proporciona flexibilidad y control sobre el hardware, siendo clave para manejar gráficos avanzados y la integración de múltiples sistemas.
OpenGLyVulkan:- Para el renderizado de gráficos en tiempo real, especialmente en simulaciones meteorológicas o mapas de navegación.
Requisitos Técnicos:
- Tiempo Real: Las pantallas deben actualizarse con información al instante para reflejar cambios en altitud, rumbo, o condiciones meteorológicas. Esto se logra utilizando sistemas operativos en tiempo real (
RTOS) que priorizan tareas críticas. - Redundancia: En caso de fallo de una pantalla, los sistemas están diseñados para redistribuir la información en otras pantallas disponibles.
- Interfaz de Usuario: Los sistemas integran elementos visuales diseñados para reducir la carga cognitiva del piloto, con un enfoque en colores, tamaños y alertas intuitivas.
- Tiempo Real: Las pantallas deben actualizarse con información al instante para reflejar cambios en altitud, rumbo, o condiciones meteorológicas. Esto se logra utilizando sistemas operativos en tiempo real (
Ventajas Operativas
- Integración de Datos:
- Los Glass Cockpits consolidan datos de múltiples sistemas, eliminando la necesidad de que los pilotos supervisen múltiples instrumentos analógicos.
- Mayor Seguridad:
- Las alertas en tiempo real y la representación visual intuitiva permiten a los pilotos reaccionar más rápido ante emergencias o condiciones cambiantes.
- Adaptabilidad:
- Estos sistemas pueden ser actualizados con nuevos algoritmos o software para adaptarse a las necesidades de cada aeronave o aerolínea.
Ejemplo Práctico
Aviones como el Airbus A320neo o el Boeing 787 Dreamliner son pioneros en el uso de cabinas de cristal, estos modelos cuentan con sistemas integrados que incluso permiten a los pilotos interactuar con las pantallas mediante interfaces táctiles o joysticks, eliminando aún más la necesidad de instrumentos analógicos.
Conexión con Sistemas Externos
Las cabinas de cristal no funcionan de forma aislada; están conectadas con sistemas como el Flight Management System (FMS) y el Traffic Collision Avoidance System (TCAS) para proporcionar datos en tiempo real sobre rutas, consumo de combustible, o alertas de colisión.
Sistema de Control Ambiental (ECS)
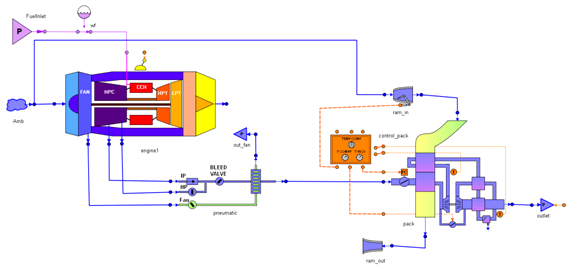
Los Sistemas de Control Ambiental (ECS) son fundamentales para garantizar la comodidad y seguridad de pasajeros y tripulación durante el vuelo, estos sistemas se encargan de regular factores críticos como la temperatura, presión y calidad del aire en la cabina, ajustándose dinámicamente a las condiciones externas y a las necesidades internas.
Monitoreo y Regulación del Aire
El ECS combina hardware avanzado con software especializado para monitorear y regular el ambiente dentro del avión:
- Sensores de Calidad del Aire:
- Miden parámetros como la presión, temperatura, humedad y concentración de oxígeno en la cabina.
- Detectan impurezas o contaminantes en el aire, ajustando los filtros y la ventilación según sea necesario.
- Regulación de Presión y Temperatura:
- Presurización: En altitudes superiores a 10,000 pies, el aire exterior no es respirable. El
ECSutiliza compresores y válvulas de control para mantener la presión dentro de la cabina a niveles seguros (generalmente equivalentes a una altitud de entre6,000y8,000pies). - Control de Temperatura: Ajusta automáticamente los sistemas de calefacción y enfriamiento para mantener una temperatura constante y cómoda.
- Presurización: En altitudes superiores a 10,000 pies, el aire exterior no es respirable. El
- Entrada de Aire Fresco:
- El
ECScombina aire del exterior con aire reciclado filtrado, asegurando un flujo constante de aire limpio. Esto no solo mejora la calidad del aire, sino que también optimiza el consumo energético.
- El
Programación y Algoritmos del ECS
La eficiencia del ECS depende en gran medida del software que gestiona sus funciones.
- Lenguajes Utilizados:
AdayC: Se emplean para la programación de sistemas críticos, debido a su confiabilidad en entornos de tiempo real.MATLAB/Simulink: Utilizados durante la fase de desarrollo para simular el comportamiento del sistema y optimizar los algoritmos de control.
- Algoritmos Clave:
- Control
PID(Proporcional-Integral-Derivativo): Este algoritmo ajusta en tiempo real la presión y temperatura, asegurando una respuesta rápida a cambios en la altitud o las condiciones internas de la cabina. - Modelos Predictivos: Los sistemas modernos integran algoritmos predictivos que anticipan cambios en el entorno, como descensos rápidos, y ajustan los parámetros antes de que los pasajeros lo perciban.
- Control
- Redundancia del Sistema:
- El
ECScuenta con software redundante que toma el control en caso de fallos, asegurando que las condiciones de la cabina se mantengan estables incluso si un componente del sistema deja de funcionar.
- El
Casos de Estudio

Un ejemplo notable del impacto del ECS es el control de presurización en vuelos de gran altitud:
- Vuelo Comercial a 35,000 pies: A estas alturas, el aire exterior tiene una presión tan baja que no es posible respirar sin ayuda. El
ECSpresuriza la cabina de forma automática, tomando aire del motor y comprimiéndolo para simular una altitud segura dentro de la cabina. - Caso de Emergencia: En el famoso incidente del vuelo Helios Airways 522 (2005), una falla en el
ECScausó la despresurización de la cabina, resultando en la pérdida de conciencia de la tripulación y pasajeros. Este evento subrayó la importancia de sistemas de control ambiental robustos y su programación precisa para detectar y mitigar fallos.
Sistemas de Radar y Sensores Modernos

Los sistemas de radar y sensores modernos han revolucionado la aviación, proporcionando datos precisos en tiempo real para la toma de decisiones y mejorando la seguridad de los vuelos en condiciones adversas. Estos sistemas dependen de tecnologías avanzadas, algoritmos y software para interpretar grandes volúmenes de información.
Radar Meteorológico y Predicción de Turbulencias
Los radares meteorológicos a bordo son fundamentales para detectar y evitar fenómenos meteorológicos adversos, como tormentas, turbulencias y cambios bruscos en el viento.
Funcionamiento del Radar Meteorológico:
- Emite pulsos de energía de microondas hacia la atmósfera y mide la reflexión de estas ondas en partículas como gotas de agua o cristales de hielo.
- Genera un mapa en tiempo real de la actividad meteorológica en la ruta de vuelo.
Procesamiento de Datos en Tiempo Real:
- Los algoritmos integrados procesan rápidamente los datos obtenidos para identificar regiones de riesgo.
- Técnicas de Machine Learning están comenzando a ser utilizadas para mejorar la predicción de turbulencias a partir de patrones meteorológicos complejos.
Lenguajes y Software:
C++yPythonson comunes en el desarrollo de estos sistemas debido a su capacidad para manejar grandes volúmenes de datos y realizar cálculos complejos.- Los sistemas también pueden integrar plataformas como
MATLABpara análisis y simulaciones durante el diseño.
Ejemplos de Uso:
- En aviones modernos como el Boeing 787 y el Airbus A350, los radares meteorológicos pueden predecir turbulencias hasta 60 millas náuticas por delante, ajustando automáticamente la altitud o la ruta para evitarlas.
Sensores Infrarrojos y Cámaras para Aterrizaje Asistido

Los sensores y cámaras modernos ayudan a superar las limitaciones de visibilidad durante el despegue y aterrizaje, especialmente en condiciones meteorológicas extremas.
Sensores Infrarrojos (Enhanced Vision Systems -
EVS):- Capturan imágenes térmicas, permitiendo a los pilotos ver objetos en la pista, como vehículos o animales, incluso en total oscuridad o niebla densa.
- Los datos del sensor se proyectan en el
HUD(Head-Up Display) o en elPFD(Primary Flight Display).
Cámaras de Alta Resolución:
- Integradas en sistemas como el Synthetic Vision System (
SVS), estas cámaras generan mapas en 3D de la pista y el entorno cercano, basándose en bases de datos geográficas. - Combinan datos reales con simulaciones para ofrecer una visión clara del entorno incluso cuando la visibilidad exterior es nula.
- Integradas en sistemas como el Synthetic Vision System (
Programación y Algoritmos:
- Los sistemas
EVSySVSson programados enC++,Ada, o inclusoRusten implementaciones modernas por su alto rendimiento y seguridad. - Algoritmos de procesamiento de imágenes y detección de bordes permiten identificar elementos clave como luces de pista o obstáculos.
- Los sistemas
Ejemplo de Implementación:
- Aviones como el Gulfstream G500 integran sensores infrarrojos avanzados que mejoran la percepción del entorno durante aterrizajes nocturnos o con niebla.
- El Boeing 787 y el Airbus A350 combinan cámaras y datos de radar para aterrizajes de precisión en aeropuertos con condiciones climáticas adversas.
Integración y Futuro de los Sistemas de Radar y Sensores
Integración con Otros Sistemas:
- Los radares y sensores trabajan en conjunto con el
FMS(Flight Management System) para ajustar automáticamente las rutas en caso de detectarse turbulencias o cambios bruscos en las condiciones meteorológicas. - Estos sistemas también están conectados con el
TCAS(Traffic Collision Avoidance System) para evitar colisiones durante aproximaciones complicadas.
- Los radares y sensores trabajan en conjunto con el
Avances Futuros:
- Sensores
LIDAR: Están siendo explorados para mejorar la precisión en la detección de obstáculos cercanos. - Inteligencia Artificial: Permitiría interpretar los datos de radar y sensores de forma más eficiente, facilitando aterrizajes automáticos en situaciones de visibilidad cero.
- Sensores más pequeños y ligeros con menor consumo energético están en desarrollo, especialmente para aviones eléctricos o drones.
- Sensores
https://es.wikipedia.org/wiki/Fly-by-wire
https://easbcn.com/el-sistema-fly-by-wire-en-el-control-de-las-aeronaves/
https://es.wikipedia.org/wiki/Avi%C3%B3nica
https://www.aviationgroup.es/actualidad/principales-sistemas-avionicos-aeronave/
https://es.wikipedia.org/wiki/Monitor_electrónico_centralizado_de_la_aeronave
https://www.oneair.es/radomo-aviones/