Imagina tener que guiar a un módulo espacial a través del vasto vacío del espacio y aterrizarlo con precisión en la superficie lunar, todo mientras se trabaja con un ordenador con menos potencia que un moderno teléfono móvil. Este fue el desafío enfrentado por el Apollo Guidance Computer (AGC) durante la histórica misión Apollo 11, la cual llevó al primer humano a la superficie lunar.
En este post, vamos a sumergirnos en el fascinante mundo del hardware y el software que hizo posible el alunizaje. Desde las intrincadas rutinas de auto-verificación hasta las complejas ecuaciones de guía lunar, descubrirás cómo el código detrás del AGC no solo llevó al hombre a la Luna, sino que también marcó un hito en la historia de la computación espacial.

Historia del AGC
Para entender el impacto del Apollo Guidance Computer (AGC) en la misión Apollo 11, primero debemos explorar su historia y su contexto.
El AGC, desarrollado en el MIT Instrumentation Laboratory bajo la dirección de Charles Stark Draper, fue un avance revolucionario en la computación espacial. Su diseño compacto y robusto estaba destinado a soportar las rigurosas condiciones del espacio y a facilitar las complejas maniobras necesarias para una misión lunar exitosa.
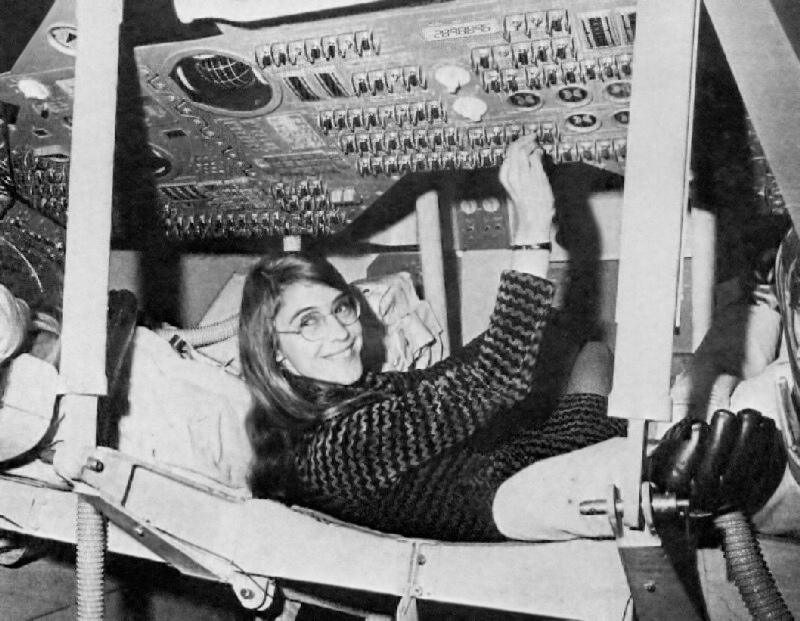
Uno de los nombres más destacados en el desarrollo del AGC es Margaret Hamilton, quien lideró el equipo de ingenieros de software. Su enfoque meticuloso en la ingeniería de software y su visión pionera no solo garantizaron el éxito de la misión Apollo 11, sino que también establecieron muchos de los principios de programación que hoy consideramos fundamentales.
Hardware del AGC
El Apollo Guidance Computer (AGC) fue una pieza fundamental del éxito de las misiones Apollo, destacando por sus innovaciones en la ingeniería de hardware y software en la época.
Características técnicas del AGC
Procesador: 2.048 MHz
![Diagrama del procesador del AGC]()
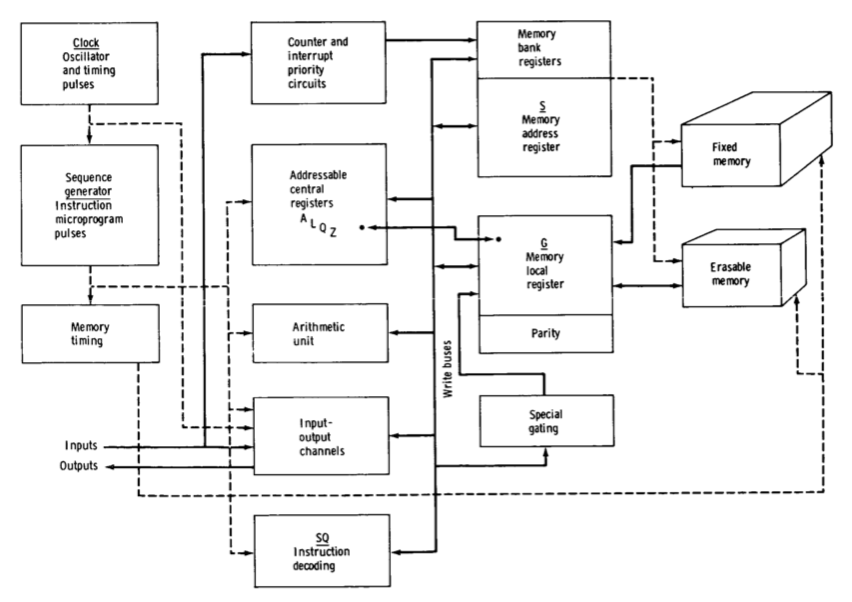
- Ciclo de Instrucción: El AGC operaba a una frecuencia de
_2.048 MHz_, lo que permitía un ciclo de instrucción de aproximadamente_11.72 microsegundos_. Cada instrucción del conjunto de instrucciones del AGC se ejecutaba en uno o más de estos ciclos. - Arquitectura: El procesador del AGC tenía una
arquitectura de 16 bits, utilizando una arquitectura word de_15 bits_más un bit de paridad. El conjunto de instrucciones incluía operaciones básicas como aritméticas, lógicas, de control de flujo, y de manipulación de datos. - Pipelining: Aunque no contaba con pipelining en el sentido moderno, el diseño eficiente del AGC permitía un flujo constante de datos e instrucciones a través del sistema.
- Ciclo de Instrucción: El AGC operaba a una frecuencia de
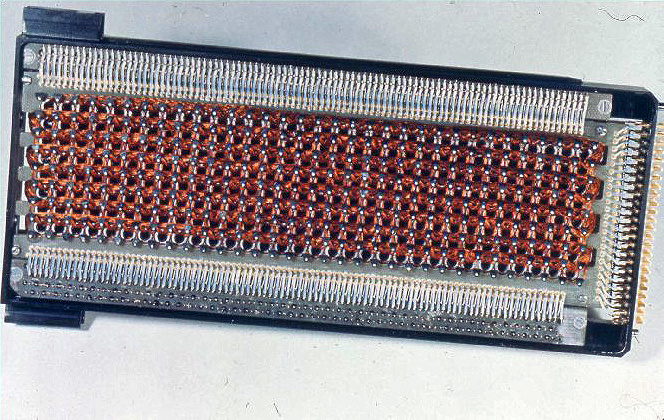
Memoria Ram (Random Access Memory): 2 KB
![Imagen de núcleos magnéticos de RAM]()
- Tecnología: La RAM del AGC estaba basada en núcleos magnéticos (magnetic core memory), una tecnología robusta y no volátil que permitía mantener el estado incluso en caso de pérdida de energía.
- Función: La RAM se utilizaba principalmente para almacenar variables temporales y datos intermedios necesarios para los cálculos en tiempo real. También se usaba para almacenar el estado del programa y los datos de navegación.
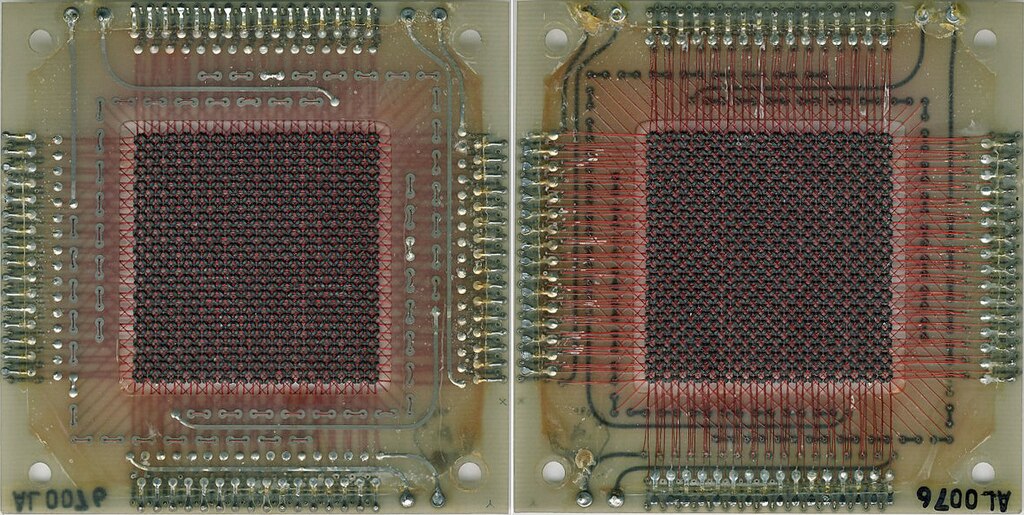
ROM (Read-Only Memory): 36 KB
![Diagrama del Core Rope Memory]()
- Tecnología: La ROM utilizaba la tecnología Core Rope Memory, donde los bits de datos se almacenaban en núcleos magnéticos mediante cables trenzados. Esta tecnología ofrecía alta densidad de almacenamiento y era extremadamente resistente a fallos.
- Función: La ROM contenía el código de programa esencial para todas las fases de la misión, incluyendo rutinas de navegación, control y manejo de datos. La estructura del software era modular, permitiendo actualizaciones y modificaciones sin alterar el código base.
Componentes Clave
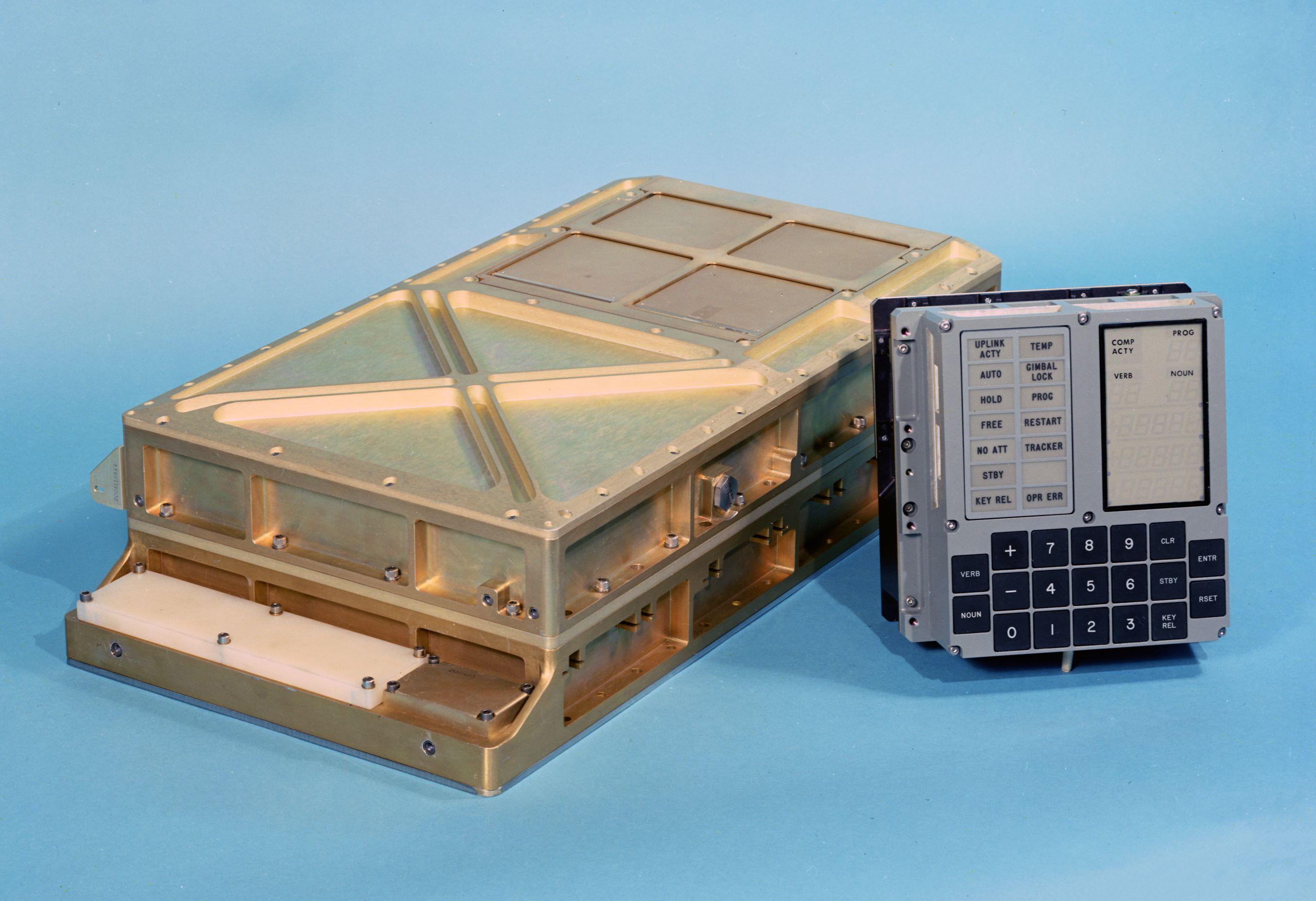
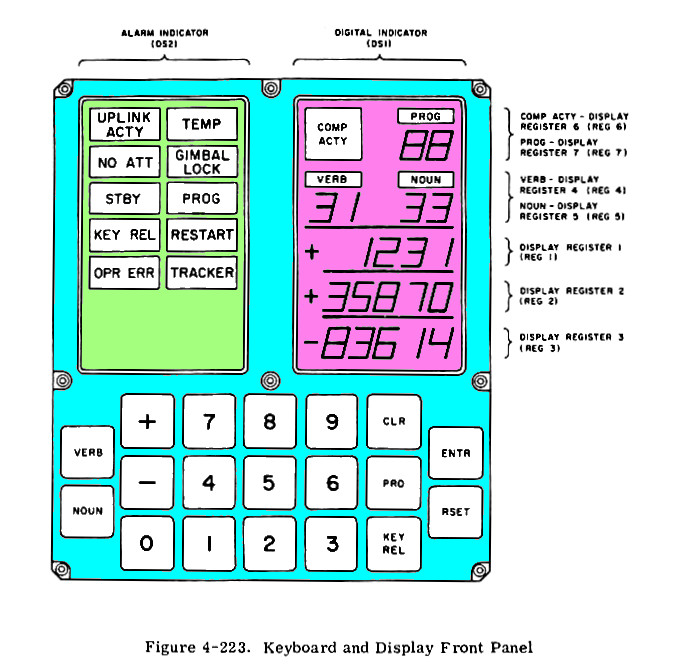
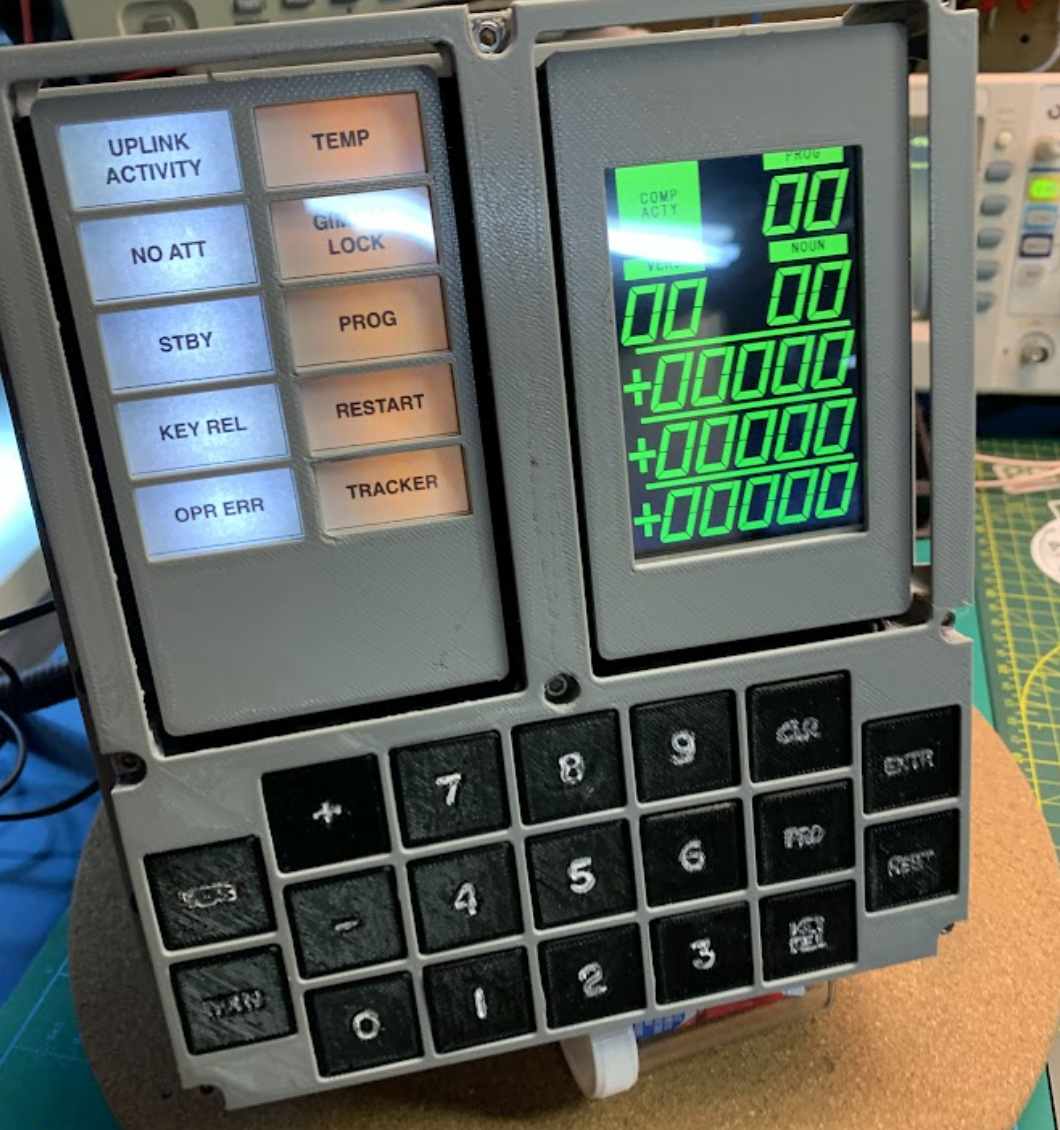
Teclado y Pantalla (DSKY - Display and Keyboard):
![Imagen del DSKY]()
- Interfaz de Usuario: El DSKY consistía en una pantalla de 7 segmentos para mostrar datos numéricos y una serie de luces de estado para indicar diferentes modos y estados del sistema. El teclado permitía la entrada de comandos mediante un conjunto de teclas numéricas y de función.
- Comunicaciones: El DSKY se comunicaba con el AGC mediante un bus de datos dedicado, permitiendo la entrada y salida rápida y eficiente de información.
Unidad de Navegación Inercial (INU - Inertial Navigation Unit):
![Diagrama de la Unidad de Navegación Inercial (INU)]()
- Componentes: El IMU contenía giroscopios y acelerómetros que proporcionaban datos sobre la orientación y aceleración de la nave. Estos datos eran críticos para la navegación y el control de la trayectoria.
- Integración: El AGC integraba los datos del IMU con sus cálculos de navegación para determinar la posición y orientación precisas del módulo lunar y el módulo de comando.
Core Rope Memory:
- Construcción: La Core Rope Memory es un tipo de memoria ROM, que estaba construida mediante el entrelazado de hilos a través de núcleos magnéticos. Un hilo que pasaba a través de un núcleo representaba un bit “1”, mientras que uno que pasaba alrededor del núcleo representaba un bit “0”.
- Ventajas: Esta tecnología proporcionaba una alta densidad de almacenamiento y era muy resistente a las perturbaciones electromagnéticas, crucial para el entorno espacial.
Innovaciones y Desafíos Técnicos
Código:
- Optimización de Código: Debido a las limitaciones de memoria y procesamiento, los ingenieros tuvieron que optimizar cada línea de código. Esto incluyó el uso eficiente de ciclos de máquina y la minimización de operaciones innecesarias.
- Subrutinas y Modularidad: El software estaba altamente modularizado, permitiendo la reutilización de código y facilitando las pruebas y la verificación.
Robustez y Fiabilidad:
- Redundancia: El AGC estaba diseñado con una redundancia en mente. Tenía múltiples niveles de verificación y recuperación de fallos para garantizar que los errores pudieran ser detectados y corregidos sin poner en peligro la misión.
- Pruebas Exhaustivas: Se realizaron pruebas extensivas de cada componente y subrutina del AGC para asegurar su correcto funcionamiento bajo todas las condiciones previstas.
Interacción Humana:
- Simplicidad y Eficiencia: El diseño del DSKY tenía que ser intuitivo para los astronautas, permitiéndoles ingresar comandos y recibir información crítica rápidamente y con mínima posibilidad de error.
- Entrenamiento: Los astronautas recibieron un entrenamiento extensivo en el uso del DSKY y la interpretación de los datos mostrados, asegurando que pudieran tomar decisiones informadas durante la misión.
El Apollo Guidance Computer no solo fue un logro técnico impresionante en su época, sino que también estableció muchos de los principios y prácticas que siguen siendo relevantes en la ingeniería de sistemas críticos y la computación en tiempo real.
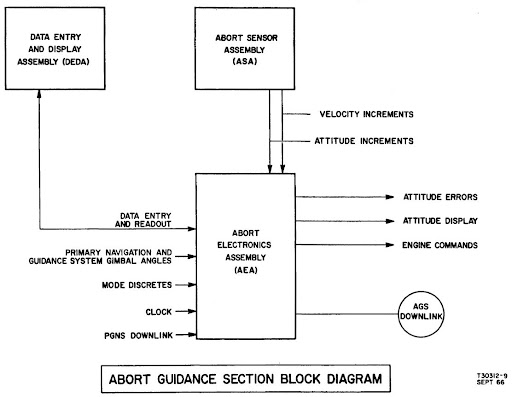
Abort Guidance System (AGS)
El Abort Guidance System (AGS) del Módulo Lunar del programa Apollo fue diseñado específicamente para proporcionar capacidades de navegación y control en caso de un fallo del sistema principal de guiado, el AGC. A continuación, algunos aspectos importantes a tener en cuenta sobre el AGS:
Arquitectura y Diseño del AGS
Computadora de Guiado (Abort Electronics Assembly, AEA)
![Abort Electronics Assembly (AEA)]()
- Procesador: Basado en tecnología de lógica discreta, menos avanzada que el procesador del AGC.
- RAM: Aproximadamente 2 KB de memoria volátil, utilizada para operaciones temporales.
- ROM: 4 KB de memoria de núcleo de ferrita para almacenar el software de emergencia.
- Instrucciones: Capaz de ejecutar un conjunto más limitado de instrucciones comparado con el AGC, adecuado para su propósito específico de manejo de abortos y emergencias.
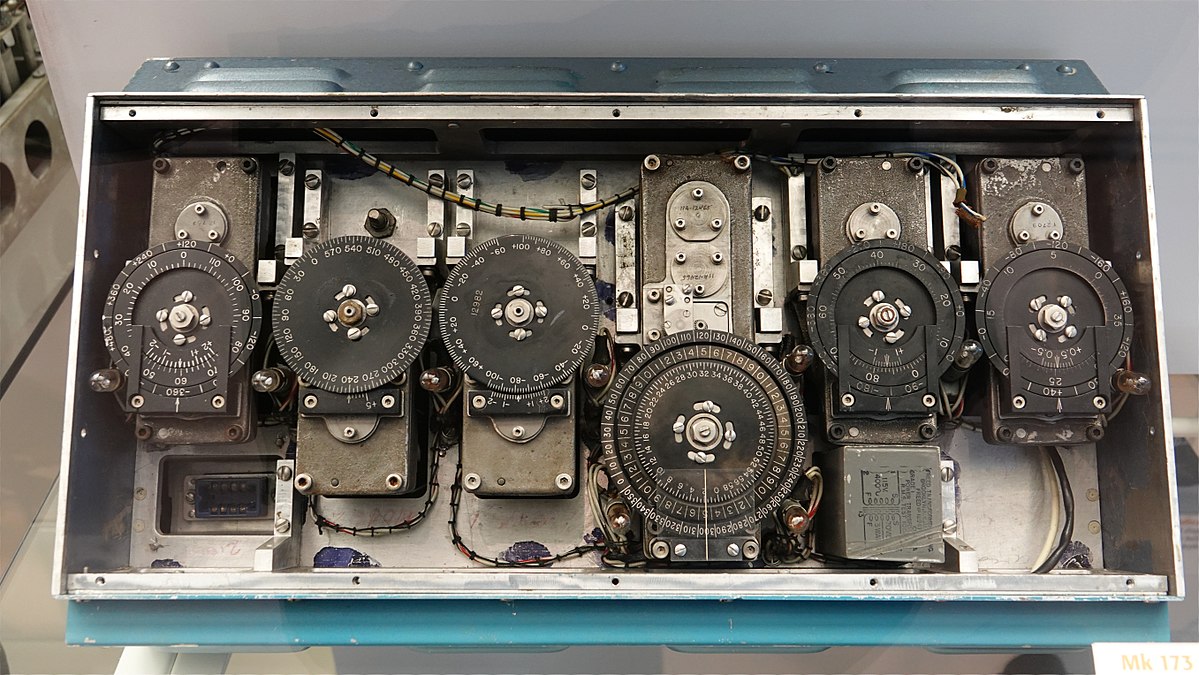
Unidad de Medición Inercial (IMU)
![Unidad de Medición Inercial (IMU)]()
- Descripción: La IMU del AGS era una versión simplificada y menos precisa que la utilizada por el AGC.
- Giroscopio: Menos preciso pero suficiente para las operaciones de emergencia.
- Acelerómetro: Proporcionaba mediciones básicas de aceleración para la navegación de respaldo.
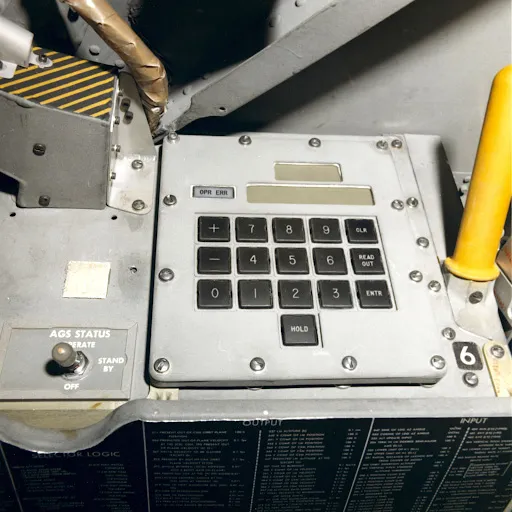
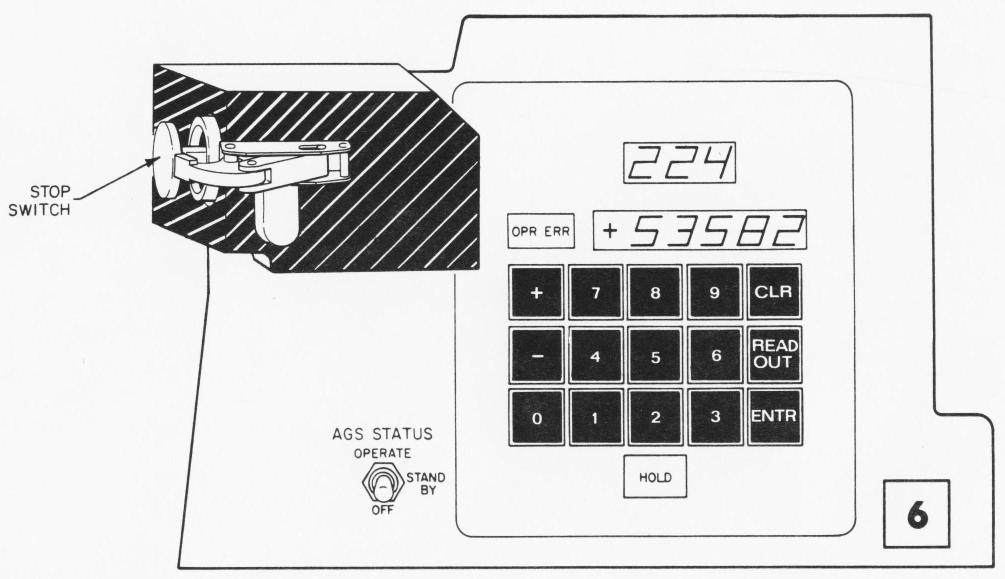
Interfaces de Entrada/Salida
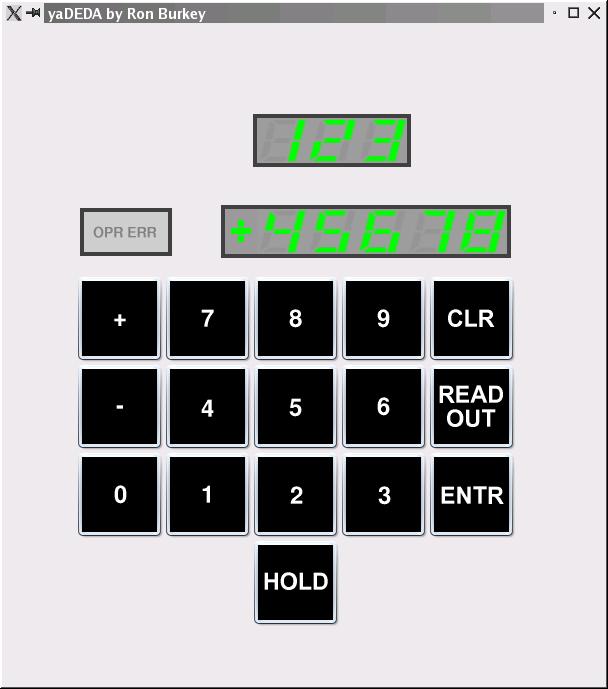
![DSKY Simplificado del AGS]()
- DSKY Simplificado: La pantalla proporcionaba información básica de estado y navegación, y el teclado permitía la entrada de comandos esenciales para la operación del AGS.
Sensores y Actuadores
- Sensores de Presión y Temperatura: Utilizados para monitorear condiciones críticas del Módulo Lunar.
- Actuadores de Control: Permitían el ajuste de la orientación y la ejecución de maniobras de emergencia.
Algoritmos de Navegación
![Diagrama de Algoritmos de Navegación]()
- Ascent Guidance Algorithm: Diseñado para calcular y ejecutar una trayectoria de ascenso segura desde la superficie lunar en caso de aborto.
- Abort Modes: Incluía modos específicos para diferentes fases del descenso y ascenso, cada uno con rutas de navegación predefinidas para maximizar la probabilidad de éxito.
Componentes de Redundancia:
- Baterías Independientes: El AGS tenía su propio sistema de energía para asegurar que funcionara incluso si el sistema principal fallaba.
- Circuitos Redundantes: Diseñados para tolerancia a fallos, permitiendo que el sistema continúe operando en condiciones adversas.

Innovaciones y Capacidades Específicas
Navegación de Respaldo
- Precisión: Aunque menos preciso que el AGC, el AGS podía proporcionar suficiente precisión para una operación de emergencia.
- Fiabilidad: Diseñado para ser extremadamente fiable y fácil de usar en situaciones de alta tensión.
Manejo de Emergencias
![Procedimientos de Emergencia]()
- Abort Modes: Capacidad para iniciar y gestionar diferentes modos de aborto basados en la fase de la misión y las condiciones presentes.
- Ascent Capability: Proporcionaba una ruta de ascenso segura en caso de un aborto durante el descenso o en la superficie lunar.
Diagnóstico y Auto-Pruebas
![Diagrama de Diagnóstico y Auto-Pruebas]()
- Monitoreo Continuo: Se realizaban auto-pruebas constantes para verificar su estado operativo.
- Alertas y Diagnósticos: Proporcionaba alertas y diagnósticos simples para informar a los astronautas sobre el estado del sistema y posibles fallos.
El Abort Guidance System (AGS) fue un componente crucial del Módulo Lunar, diseñado para proporcionar un respaldo robusto y fiable en caso de fallo del sistema principal de guiado, el AGC.
Su diseño simplificado, junto con su capacidad para manejar situaciones de emergencia, lo convirtió en una herramienta vital para la seguridad de las misiones Apollo. Aunque menos potente y preciso que el AGC, el AGS desempeñó un papel esencial en la estrategia de redundancia y gestión de riesgos del programa Apollo.
Codigo Fuente AGC
En las siguientes secciones, exploraremos varios archivos de código fuente clave que ilustran cómo el AGC gestionaba tareas críticas como la navegación, el control de actitud, las maniobras automáticas y las rutinas de emergencia.
Analizaremos el propósito de cada archivo, su estructura y las innovaciones técnicas que hicieron posible la realización de estas funciones vitales en el entorno hostil del espacio.
AGC_BLOCK_TWO_SELF_CHECK.agc
Descripción del Programa:
- Fecha: 20 de diciembre de 1967
- Nombre del Programa:
SELF-CHECK - Sección: AGC BLOCK TWO SELF-CHECK
Subrutina de Ensamblaje:
UTILITYM REV 25Descripción Funcional:
El programa tiene dos partes principales:
SELF-CHECK: Corre como un trabajo de prioridad cero sin núcleo establecido, como parte del bucle de respaldo inactivo.SHOW-BANKSUM: Corre como un trabajo ejecutivo regular con su propio verbo de inicio.
Propósito:
SELF-CHECK: Verificar varias partes del ordenador según las opciones.SHOW-BANKSUM: Mostrar la suma de cada banco, uno a la vez.
Opciones de SELF-CHECK:
Controladas por números en el registro
SMODE(NOUN 27):4: Memoria borrable.5: Memoria fija.1,2,3,6,7,10: Todo lo anterior.0: Igual que+10hasta que se detecta un error.+0: Sin chequeo, pone la computadora en el bucle inactivo de respaldo.
Secuencia de Llamada:
- Para llamar a SELF-CHECK:
V 21 N 27 E Número de opción E - Para llamar a SHOW-BANKSUM:
V 91 E: Muestra el primer banco.V 33 E: Procede y muestra el siguiente banco.
- Para llamar a SELF-CHECK:
Modos de Salida
SELF-CHECK: Continúa indefinidamente a menos que se detecte un error.SHOW-BANKSUM: Procede hasta que se termina (V 34 E).
Salida:
- SELF-CHECK: Al detectar un error, carga la constante de alarma (
01102) y enciende la luz de alarma.- Mostrar registros de fallas:
V 05 N 09 E. - Información adicional:
V 05 N 08 E.
- Mostrar registros de fallas:
SHOW-BANKSUM:
R1: Suma del banco.R2: Número de banco.R3: Palabra auxiliar.
- SELF-CHECK: Al detectar un error, carga la constante de alarma (
Código de Ensamblador:
Archivos del Módulo Lunar (LM)
El software Luminary 099 es una pieza fundamental en la historia de la exploración espacial, ya que fue el software de vuelo utilizado en el Módulo Lunar (LM) durante las misiones Apollo.
El término “Luminary” se refiere a algo que emite luz, como una estrella o una fuente de inspiración. Este nombre es particularmente apto para el software de guía y navegación del Módulo Lunar del AGC. De manera simbólica, “Luminary” también refleja la aspiración de la misión Apollo de iluminar el camino para la humanidad en la exploración espacial, convirtiéndose en una luz guía en la historia de la ciencia y la ingeniería.
El número “099” representa una versión específica del software. En el contexto del desarrollo de software, los números de versión son esenciales para llevar un registro de las distintas iteraciones del programa.
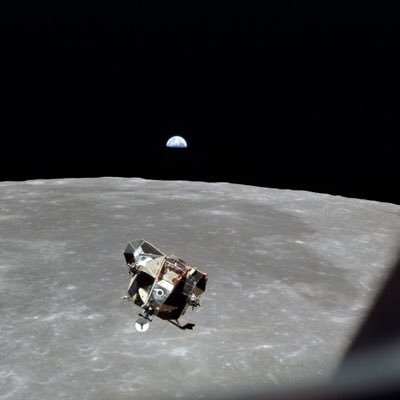
Luminary 099 es especialmente notable porque fue la versión utilizada durante la misión Apollo 11, la histórica misión que logró el primer alunizaje tripulado el 20 de julio de 1969. Este software fue responsable de las complejas tareas de navegación y control necesarias para guiar el módulo lunar “Eagle” desde la órbita lunar hasta su alunizaje en el Mar de la Tranquilidad y luego de vuelta a la órbita para reunirse con el Módulo de Comando y Servicio “Columbia”.
ASCENT_GUIDANCE.agc
Este código es parte del Ordenador de Guía del Apollo (AGC) para la fase de ascenso del Módulo Lunar durante la misión Apollo 11. La fase de ascenso implica el lanzamiento del Módulo Lunar desde la superficie de la Luna de vuelta a la órbita lunar para encontrarse con el Módulo de Comando.
Ensamblador:
El ensamblador utilizado para este código es
yaYUL.Secciones:
El código está estructurado en varias secciones con funcionalidad específica para la guía de ascenso, como cálculos para la velocidad, posición y señales de control para asegurar que el Módulo Lunar siga la trayectoria correcta.
- Elementos y Conceptos Clave:
Cambio de Banco:
El AGC usa cambio de banco para gestionar su memoria limitada. Comandos como
BANKySETLOCestablecen el banco de memoria y la ubicación para las instrucciones subsiguientes.Símbolos y Macros:
TC: Transferencia de control.OCT: Constante octal.DXCH: Intercambiar datos.DLOAD,DDV,DSU,DAD: Carga de datos, división, resta, suma.STCALL: Almacenar y llamar a una subrutina.
Cálculos de Guía:
El código calcula varios parámetros para la fase de ascenso:
ZDOT,YDOT,RDOT: Componentes de velocidad.DZDOT,DYDOT,DRDOT: Componentes delta de velocidad.VE,TGO: Velocidad y tiempo restante.ATR,ATY: Términos de aceleración en diferentes ejes.
Flags y Control:
FLRCS: Flag para el Sistema de Control de Reacción.MAINENG: Operación del motor principal.IDLEFLAG: Deshabilita la monitorización del Delta-V.T2TEST,FLPC,NORATES,RATES: Varios flags para controlar la secuencia de ascenso.
Manejo y Corrección de Errores:
ZATTEROR: Errores de actitud cero.ENGOFF1: Secuencia de apagado del motor.
Subrutinas y Operaciones:
El código llama frecuentemente a varias subrutinas para realizar cálculos complejos y manejar tareas específicas:
PHASCHNG: Cambio de Fase.CHECKALT: Comprobar altitud.CHECKYAW: Comprobar alineación de guiñada.
Código de Ensamblador:
BURN_BABY_BURN–MASTER_IGNITION_ROUTINE.agc
El nombre de esta rutina, “BURN BABY BURN”, es una referencia a la frase famosa del locutor Magnificent Montague, reflejando un toque de humor histórico y cultural en la programación del AGC.
La rutina es compleja, manejando diversos escenarios e integrándose con múltiples componentes y tareas. Utiliza una mezcla de comprobaciones inmediatas, gestión de cuenta atrás y manejo del estado del sistema para asegurar una ignición y operaciones posteriores sin problemas.
Propósito:
La rutina BURN BABY BURN gestiona la ignición del sistema de propulsión del Módulo Lunar del Apolo. Se encarga de varias tareas relacionadas con la ignición, desde las comprobaciones de tiempo (si está dentro de los 45 segundos del tiempo de ignición) hasta los 26 segundos después de la ignición, cuando el sistema de propulsión comienza a aumentar su potencia.
Programas que usan esta Rutina:
Se utiliza en los programas del LM:
P12,P40,P42,P61,P63.Secciones y Funciones Clave
Tablas para la Rutina de Ignición:
Estas tablas (por ejemplo,
P12TABLE,P40TABLE) contienen constantes e instrucciones TCF (Transfer Control Function) que guían el comportamiento específico de la rutina de ignición para diferentes programas.Rutinas de Ignición de Propósito General:
BURNBABY: El punto de entrada de la rutina. Configura varios parámetros y llama a subrutinas comoP40AUTOpara manejar las tareas de ignición.TIG-35: Maneja la cuenta atrás y gestiona situaciones donde la ignición podría ser retrasada.TIG-30,TIG-30A,TIG-5: Manejan verificaciones específicas del tiempo y el estado del sistema en diferentes etapas de la cuenta atrás.P63IGN,P40IGN,P42IGN: Inician procedimientos de ignición para programas específicos (P63,P40,P42).
Manejo de Errores y Fallos:
COMFAILx: Manejan fallos de comunicación y otros problemas. Cada tipo de fallo (por ejemplo,COMFAIL3,COMFAIL4) realiza diferentes acciones como reiniciar monitores de visualización, reconectar pantallas o reinicializar componentes.
Manejo del Tiempo y Tareas:
WAITABIT,TIGTASK: Gestiona retrasos y asegura que las tareas se completen en momentos específicos. Por ejemplo,WAITABITasegura que ciertas tareas se retrasen adecuadamente.ULLAGOFF,COMMON: Manejan tareas específicas como desactivar la detección de ullage o tareas comunes compartidas entre diferentes programas.
Código de Ensamblador:
LANDING_ANALOG_DISPLAYS.agc
Controlar y actualizar las pantallas analógicas que muestran datos críticos a los astronautas durante el alunizaje. Estas pantallas proporcionan información sobre el estado del módulo lunar y ayudan a los astronautas a tomar decisiones durante el proceso de descenso.
Organización del Código:
- Configuración del Banco de Memoria y Localización
1 2 3
BANK 21 SETLOC R10 BANK
Aquí, se establece el banco de memoria 21 y se define la localización inicial del código en
R10. Esto es esencial para asegurarse de que las instrucciones posteriores accedan a la memoria adecuada.- Actualización de TBASE2 y PIPCTR
1 2 3
LANDISP LXCH PIPCTR1 CS TIME1 DXCH TBASE2
Este bloque de código actualiza
TBASE2yPIPCTRcon valores deTIME1.PIPCTRes un contador para la visualización, mientras queTBASE2puede estar relacionado con la base de tiempo de las mediciones.- Manejo de la Visualización de Altitud y Tasa de Altitud
1 2 3 4 5 6 7 8
CS FLAGWRD7 MASK SWANDBIT CCS A TCF DISPRSET CA IMODES33 MASK BIT7 CCS A TCF ALTOUT
Este bloque verifica si el indicador
FLAGWRD7está configurado. Si no está, se salta aDISPRSET. Si está, se verifica el modo de visualización enIMODES33. Si el bit 7 está activado, se dirige aALTOUT, que maneja la visualización de la tasa de altitud.- Cálculo de la Tasa de Altitud
1 2 3 4 5 6 7
ALTROUT TC DISINDAT CS IMODES33 MASK BIT7 ADS IMODES33 CAF BIT2 EXTEND WOR CHAN14
En esta sección, se calcula la tasa de altitud basándose en el comando de tasa (
BIT2). Se multiplica el componenteVVECTporRUNITpara calcular la tasa de altitud.- Conversión de Datos
1 2 3 4 5 6 7 8 9 10 11
CA ARCONV EXTEND MP RUPTREG1 DDOUBL DDOUBL XCH RUPTREG1 CA DALTRATE EXTEND MP DT AD RUPTREG1 TS ALTRATE
Este fragmento convierte la tasa de altitud a unidades de bit mediante un factor de conversión. Luego, se almacena en
ALTRATEpara su visualización.- Visualización de Datos
1 2 3 4 5
DATAOUT TS ALTM CAF BIT3 EXTEND WOR CHAN14 TCF TASKOVER
Aquí, se envía el dato de tasa de altitud a la pantalla analógica (
ALTM). El bit 3 controla la visualización de la tasa de altitud o altitud.- Manejo de Datos de Velocidad
1 2 3 4 5 6 7 8
SPEEDRUN CS PIPTIME +1 AD TIME1 AD HALF AD HALF XCH DT CA 1SEC TS ITEMP5 EXTEND
Este bloque calcula la velocidad utilizando el tiempo y otros parámetros para actualizar la componente de velocidad en el vector
VVECT.- Monitoreo de Velocidades
1 2 3 4
VMONITOR TS ITEMP5 CCS LATVEL TCF +4 TCF LVLIMITS
Este segmento realiza un monitoreo de las velocidades lateral y de avance. Verifica que los valores estén dentro de los límites aceptables y actualiza las pantallas en consecuencia.
- Manejo de Errores y Salida
1 2 3 4
DISPRSET CS FLAGWRD0 MASK R10FLBIT EXTEND BZF ABORTON
Aquí se gestionan los errores y se realiza una limpieza de los indicadores. Si hay un error o se ha terminado el proceso, el código se dirige a
TASKOVER.Código de Ensamblador:
THE_LUNAR_LANDING.agc
El archivo
THE_LUNAR_LANDING.agcse encarga de la fase de alunizaje del Módulo Lunar durante las misiones Apollo. Incluye la preparación, el cálculo de correcciones de guía, la verificación de componentes y la confirmación final del alunizaje. El código está dividido en bloques que manejan la configuración, el cálculo de guía, la verificación de componentes y la confirmación del alunizaje, asegurando así una transición precisa y controlada a la fase de aterrizaje en la Luna.- Guía e Integración:
- La sección
IGNALGes responsable de configurar las entradas para el algoritmo de guía y realizar los cálculos iniciales para el alunizaje. - Integra el estado hacia adelante hasta el tiempo de alunizaje y configura varias variables utilizadas en los cálculos de guía.
- La sección
- Corrección y Ajuste de Errores:
DDUMCALCrealiza cálculos para el algoritmo de guía, manejando términos de corrección y actualizando estimaciones para la guía del alunizaje.- Calcula y almacena parámetros necesarios para refinar el enfoque de alunizaje y corregir cualquier error.
- Procedimientos Finales:
- La sección
P63SPOT2inicializa el sistema para la actitud de alunizaje y alinea la nave espacial. P63SPOT3yP63SPOT4manejan la inicialización del radar de alunizaje y verifican si los sistemas específicos están en la posición correcta.
- La sección
- Confirmación de Alunizaje:
- La sección
LANDJUNKmaneja los pasos finales para la confirmación del alunizaje, estableciendo flags y realizando las últimas verificaciones antes del alunizaje. - Calcula la posición final del sitio de alunizaje y verifica si el alunizaje ha sido exitoso.
- La sección
- Explicación de las Secciones Clave:
P63LM(Fase de Alunizaje del Módulo Lunar):- Este es el subprograma principal para la fase de alunizaje. Se encarga de:
- Verificar el estado del IMU (Unidad de Medición Inercial).
- Inicializar parámetros necesarios para la fase de alunizaje.
- Coordinarse con los programas de guía para asegurar un alunizaje preciso.
- Este es el subprograma principal para la fase de alunizaje. Se encarga de:
IGNALG(Algoritmo de Guía Inicial):- Este subprograma configura e integra los cálculos iniciales de guía, necesarios para la fase de alunizaje. Sus tareas incluyen:
- Realizar cálculos y correcciones basados en el estado actual de la nave espacial.
- Asegurar que los procedimientos de alunizaje sean precisos mediante la configuración del algoritmo de guía.
- Este subprograma configura e integra los cálculos iniciales de guía, necesarios para la fase de alunizaje. Sus tareas incluyen:
DDUMCALC(Cálculo de Dummy):- Este subprograma realiza cálculos específicos relacionados con la guía, que incluyen:
- Manejo de términos de corrección e integración de parámetros.
- Ajustes necesarios para el algoritmo de guía durante el alunizaje.
- Este subprograma realiza cálculos específicos relacionados con la guía, que incluyen:
P63SPOT2,P63SPOT3, yP63SPOT4:- Estas secciones se encargan de tareas específicas de configuración, tales como:
P63SPOT2: Inicializa el sistema para la actitud de alunizaje y alinea la nave espacial.P63SPOT3: Verifica la posición de la antena LR y realiza ajustes según sea necesario.P63SPOT4: Maneja la inicialización del radar de alunizaje y confirma que todos los sistemas están listos para el alunizaje.
- Estas secciones se encargan de tareas específicas de configuración, tales como:
LANDJUNK(Confirmación de Alunizaje):- La fase final del proceso de alunizaje donde se realiza la confirmación del alunizaje. Incluye:
- El cálculo de la posición final del sitio de alunizaje.
- Verificación de que el alunizaje ha sido exitoso.
- Establecimiento de flags y realización de las últimas comprobaciones antes del alunizaje final.
- La fase final del proceso de alunizaje donde se realiza la confirmación del alunizaje. Incluye:
- Explicación Detallada del Código:
Configuración Inicial:
1 2 3 4 5
BANK 32 SETLOC F2DPS*32 BANK EBANK= E2DPS
BANK 32: Selecciona el banco de memoria 32 para las siguientes operaciones.SETLOC F2DPS*32: Establece la dirección de localización en la memoria.EBANK= E2DPS: Define el banco de memoria extendida.
Fase de Alunizaje, Preparación y Configuración:
1
COUNT* $$/P63
COUNT* $$/P63: Marca el comienzo de la sección del código P63, que se refiere a la fase de alunizaje.
1 2
P63LM TC PHASCHNG OCT 04024
P63LM TC PHASCHNG: Transición a la fase de alunizaje (P63), con el código de cambio de fase.
1 2
TC BANKCALL # DO IMU STATUS CHECK ROUTINE R02 CADR R02BOTH
TC BANKCALL CADR R02BOTH: Llama a la rutina R02 para verificar el estado del IMU (Unidad de Medición Inercial).
1 2 3 4 5 6
CAF P63ADRES # INITIALIZE WHICH FOR BURNBABY TS WHICH CAF DPSTHRSH # INITIALIZE DVMON TS DVTHRUSH CAF FOUR TS DVCNTR
CAF P63ADRES TS WHICH: Carga y almacena la dirección para la fase de alunizaje.CAF DPSTHRSH TS DVTHRUSH: Carga y almacena el umbral para el monitoreo del DV.CAF FOUR TS DVCNTR: Inicializa el contador del DV con el valor 4.
1 2 3 4
CS ONE # INITIALIZE WCHPHASE AND FLPASS0 TS WCHPHASE CA ZERO TS FLPASS0
CS ONE TS WCHPHASE: Inicializa la fase de guía.CA ZERO TS FLPASS0: Inicializa el flag de paso.
1 2 3
CS BIT14 EXTEND WAND CHAN12 # REMOVE TRACK-ENABLE DISCRETE.
CS BIT14 EXTEND WAND CHAN12: Manipula el canal para deshabilitar el seguimiento.
Configuración de Flags y Parámetros:
1 2 3 4 5 6 7 8 9 10
FLAGORGY TC INTPRET CLEAR CLEAR NOTHROTL REDFLAG CLEAR SET LRBYPASS MUNFLAG CLEAR CLEAR P25FLAG # TERMINATE P25 IF IT IS RUNNING. RNDVZFLG # TERMINATE P20 IF IT IS RUNNING
FLAGORGY TC INTPRET: Configura banderas para la fase de alunizaje.CLEAR: Limpia los flags y realiza ajustes necesarios.
Algoritmo de Guía Inicial (
IGNALG):1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
IGNALG SETPD VLOAD 0 # AT 0D LANDING SITE IN MOON FIXED FRAME RLS # AT 6D ESTIMATED TIME OF LANDING PDDL PUSH # MPAC NON-ZERO TO INDICATE LUNAR CASE TLAND STCALL TPIP # ALSO SET TPIP FOR FIRST GUIDANCE PASS RP-TO-R VSL4 MXV REFSMMAT STCALL LAND GUIDINIT # GUIDINIT INITIALIZES WM AND /LAND/ DLOAD DSU TLAND GUIDDURN STCALL TDEC1 # INTEGRATE STATE FORWARD TO THAT TIME LEMPREC
IGNALG SETPD VLOAD: Configura el algoritmo de guía inicial.PDDL PUSH TLAND: Establece el tiempo estimado de alunizaje.STCALL TPIP: ConfiguraTPIPpara el primer pase de guía.STCALL LAND GUIDINIT: Inicializa el sistema de guía.DLOAD DSU TLAND GUIDDURN: Carga datos para la duración de la guía y el tiempo.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
SSP VLOAD NIGNLOOP 40D UNITX STOVL CG UNITY STOVL CG +6 UNITZ STODL CG +14 99999CON STOVL DELTAH # INITIALIZE DELTAH FOR V16N68 DISPLAY ZEROVECS STODL UNFC/2 # INITIALIZE TRIM VELOCITY CORRECTION TERM HI6ZEROS STORE TTF/8
SSP VLOAD NIGNLOOP 40D UNITX: Inicializa los parámetros necesarios para el cálculo de la guía.STOVL CG UNITY: Configura los valores de los vectores de guía.
Bucle de Cálculo y Corrección (
IGNALOOP):1 2 3 4 5 6 7 8 9 10
IGNALOOP DLOAD TAT STOVL PIPTIME1 RATT1 VSL4 MXV REFSMMAT STCALL R MUNGRAV STCALL GDT/2 ?GUIDSUB # WHICH DELIVERS N PASSES OF GUIDANCE
IGNALOOP DLOAD TAT STOVL PIPTIME1: Realiza cálculos continuos y ajustes de tiempo.STCALL R MUNGRAV: Llama a la rutina para calcular la gravedad lunar.
Cálculo de Corrección Dummy (
DDUMCALC):1 2 3 4 5
DDUMCALC TS NIGNLOOP TC INTPRET DLOAD DMPR # FORM DENOMINATOR FIRST VGU KIGNX/B4
DDUMCALC TS NIGNLOOP TC INTPRET: Configura el cálculo de corrección dummy.DLOAD DMPR: Calcula el denominador para la corrección.
Procedimientos de Verificación y Finalización:
1 2 3 4 5 6
P63SPOT2 VLOAD UNIT R60VSAVE STOVL POINTVSM UNITX STORE SCAXIS EXIT
P63SPOT2 VLOAD UNIT R60VSAVE: Inicializa el cálculo de actitud de alunizaje.
1 2 3 4 5
P63SPOT3 CA BIT6 # IS THE LR ANTENNA IN POSITION 1 YET EXTEND RAND CHAN33 EXTEND BZF P63SPOT4 # BRANCH IF ANTENNA ALREADY IN POSITION 1
P63SPOT3 CA BIT6 EXTEND RAND CHAN33: Verifica si la antena está en la posición correcta.
1 2 3 4
P63SPOT4 TC BANKCALL # ENTER INITIALIZE LANDING RADAR CADR SETPOS1 TC POSTJUMP # OFF TO SEE THE WIZARD... CADR BURNBABY
P63SPOT4 TC BANKCALL CADR SETPOS1: Inicializa el radar de alunizaje y transita al siguiente paso.
Confirmación de Alunizaje (
LANDJUNK):1 2
LANDJUNK TC PHASCHNG OCT 04024
LANDJUNK TC PHASCHNG: Marca la fase de confirmación del alunizaje.
1 2 3 4 5 6
INHINT TC BANKCALL # ZERO ATTITUDE ERROR CADR ZATTEROR TC BANKCALL # SET 5 DEGREE DEADBAND CADR SETMAXDB
INHINT TC BANKCALL CADR ZATTEROR: Llama a la rutina para corregir el error de actitud y ajustar el rango muerto de 5 grados.
1 2 3 4 5 6 7 8 9 10 11 12
TC INTPRET SET CLEAR SURFFLAG LETABORT SET VLOAD APSFLAG RN STODL ALPHAV PIPTIME SET CALL LUNAFLAG LAT-LONG
SET CLEAR SURFFLAG LETABORT: Configura las banderas finales para la confirmación.SET VLOAD APSFLAG RN STODL ALPHAV PIPTIME: Configura y almacena los parámetros finales del alunizaje.
1 2 3 4 5 6
CAF V06N43* # ASTRONAUT: NOW LOOK WHERE YOU ENDED UP TC BANKCALL CADR GOFLASH TCF GOTOPOOH # TERMINATE TCF +2 # PROCEED TCF -5 # RECYCLE
CAF V06N43 TC BANKCALL CADR GOFLASH*: Muestra la posición final y permite proceder o reciclar según sea necesario.
Constantes y Parámetros:
1 2 3 4 5 6 7 8 9 10
P63ADRES GENADR P63TABLE ASTNDEX = MD1 # OCT 25: INDEX FOR CLOKTASK CODE500 OCT 00500 99999CON 2DEC 30479.7 B-24 GUIDDURN 2DEC +66440 # GUIDDURN +6.64400314 E+2 DDUMCRIT 2DEC +8 B-28 # CRITERION FOR IGNALG CONVERGENCE
P63ADRES GENADR P63TABLE: Define la dirección para el proceso de alunizaje.CODE500 OCT 00500: Define constantes necesarias para el proceso.99999CON 2DEC 30479.7 B-24: Establece una constante para el cálculo.
1 2
LANDJUNK TC PHASCHNG OCT 04024
LANDJUNK TC PHASCHNG: Marca la fase de confirmación del alunizaje, indicando que el proceso de alunizaje ha llegado a su fin.
Código de Ensamblador:
- Guía e Integración:
Archivos del Módulo de Comando y Servicio (CSM)
El software Comanche 055 es otra pieza crucial en la historia de la exploración espacial, ya que fue el software de vuelo utilizado en el Módulo de Comando (CM) durante las misiones Apollo.
El término “Comanche” hace referencia a una tribu nativa americana conocida por su habilidad en la navegación y estrategia en el terreno, cualidades que son paralelas a las necesidades del Módulo de Comando en las misiones Apollo. Esta denominación simboliza la misión del software de guiar y proteger a los astronautas durante sus viajes a la Luna y su regreso a la Tierra, de la misma manera que los Comanches eran maestros en guiar a su gente a través de vastas regiones.
Al igual que con el número del Luminary 099, el 055 representa una versión específica del software del Módulo de Comando.
Para entender cómo el Módulo de Comando y Servicio (CSM) del Apollo 11 manejó sus complejas tareas, exploraremos algunos de los archivos más relevantes del software Comanche 055. Estos archivos son fundamentales para comprender el funcionamiento del CSM durante la misión. A continuación, presentamos una selección de los archivos más importantes e interesantes:
CM_BODY_ATTITUDE.agc
El propósito de este código es actualizar y manejar los ángulos de orientación del módulo de comando en respuesta a las lecturas de los acelerómetros y giroscopios. El código guarda las posiciones actuales y calcula los cambios en la orientación basándose en estas lecturas, manteniendo la estabilidad y control necesarios para las maniobras durante la misión.
Sección y Subrutina
Sección Principal: Control de la Actitud del Cuerpo (
CM_BODY_ATTITUDE)Subrutina Principal:
CM/ATUP(Actualización de los Ángulos de Actitud)
Descripción Funcional
Guardado de Ángulos y Valores de Gimbal:
Los ángulos de gimbal y del cuerpo válidos en el momento
PIPson guardados durante la lectura de los acelerómetros (READACCS).- Configuración Inicial y Cálculo de Vectores:
- El intérprete establece el banco correcto.
- Se realizan cálculos vectoriales y se almacenan los resultados para su uso en la guía de entrada y coordenadas de referencia.
- Cálculos de Trayectoria y Ángulos:
- Se calculan los vectores relativos y se almacenan los resultados.
- Se obtienen triadas de trayectoria y se calculan los componentes del movimiento del módulo.
- Actualización de Ángulos:
- La subrutina
CM/ATUPse encarga de actualizar los ángulos de actitud (ROLL,BETA,ALFA) basándose en los datos obtenidos desde la última actualización. - Se manejan las interrupciones y se aseguran los cálculos precisos corrigiendo los posibles desbordamientos.
- La subrutina
- Corrección y Ajuste de Ángulos:
- La subrutina
CM/ATUPse encarga de actualizar los ángulos de actitud (ROLL,BETA,ALFA) basándose en los datos obtenidos desde la última actualización. - Se manejan las interrupciones y se aseguran los cálculos precisos corrigiendo los posibles desbordamientos.
- La subrutina
- Detalles Técnicos
KVSCALE: Constante utilizada para la escala de velocidad.TCDU: Tiempo de ciclo de unidad (0.1 segundos).- Subrutinas Específicas:
CM/POSE,CM/POSE2,CM/POSE3: Manejan diferentes etapas del cálculo de orientación.DOGAMDOT,NOGAMDOT: Deciden si calcular o no la velocidad angular en base a ciertas condiciones.REDOPOSE,CORANGOV: Ajustan los ángulos y manejan los posibles desbordamientos.
Código de ensamblador:
IMU_CALIBRATION_AND_ALIGNMENT.agc
Esta porción de código del AGC se usa para la Calibración y Alineación de la IMU, diseñada específicamente para soportar varias pruebas de rendimiento y rutinas relacionadas con la Unidad de Medición Inercial (IMU) para el Módulo de Comando del Apollo. A continuación, presento una explicación de las secciones clave y sus propósitos:
Pruebas de Rendimiento de la IMU:
Inicialización: El código inicializa las pruebas de la IMU, configurando varios contadores y flags a cero. Esto incluye el
NDXCTR(contador de índice) y elTORQNDX(índice de torque).Rutinas de Posicionamiento: Se utilizan varias rutinas para posicionar y alinear la IMU. El programa configura y verifica varios componentes geométricos y realiza cálculos como seno y coseno de la latitud, azimut y otros parámetros de alineación.
Pruebas de Deriva del Giroscopio: El código realiza pruebas del giroscopio para asegurar que los giroscopios funcionen correctamente. Esto implica configurar temporizadores (
LENGTHOT), capturar y procesar pulsosPIPA(Acelerómetro Péndulo Integrador Pulsado).Compensación de la Velocidad de la Tierra: El código compensa la velocidad de rotación de la Tierra calculando y aplicando correcciones a las lecturas de la IMU. Esto asegura un posicionamiento y alineación precisos a pesar del movimiento de la Tierra.
Manejo de Datos y Prueba de Reinicio:
Prueba de Reinicio: Para manejar posibles reinicios, el código incluye rutinas para almacenar y recargar datos críticos. Esto asegura que el sistema pueda reanudar pruebas o procedimientos de alineación sin comenzar desde cero.
Almacenamiento y Carga: Los datos relacionados con la alineación y calibración de la IMU se almacenan periódicamente y se pueden recargar para continuar las operaciones sin problemas después de un reinicio.
Procedimientos de Alineación y Calibración:
Alineación Gruesa (
COAALIGN): Esta rutina maneja la alineación inicial de la IMU, configurando la orientación y asegurando que la plataforma esté correctamente alineada.Alineación Fina (
IMUFINE): Después de la alineación gruesa, la rutina de alineación fina ajusta la orientación de la IMU con mayor precisión.Pruebas
PIPA(PIPACHK): Esta rutina prueba elPIPApara medir tasas verticales y asegurar la precisión de la IMU.
Desglose Detallado:
Inicialización (
IMUTEST): Limpia y configura valores iniciales para tiempos de deriva, componentes geográficos y otros parámetros de prueba.Pruebas de Deriva del Giroscopio (
VERTDRFT,TORQUE): Realiza pruebas para medir y compensar la deriva en los giroscopios.Compensación de la Velocidad de la Tierra (
ERTHRVSE,EARTHR): Calcula la compensación necesaria para la rotación de la Tierra para mantener lecturas precisas de la IMU.Procedimientos de Alineación (
COAALIGN,IMUFINE): Alinea inicialmente la IMU y ajusta la alineación para operaciones precisas.Captura de Pulsos
PIPA(CHECKG,PIPACHK): Captura y procesa pulsosPIPApara asegurar que la IMU mida con precisión la aceleración y orientación.Prueba de Reinicio (
STOREDTA,LOADSTDT): Asegura que, en caso de un reinicio, los datos críticos de alineación y calibración se guarden y puedan recargarse para reanudar operaciones rápidamente.
Código de ensamblador:
ORBITAL_INTEGRATION.agc
Este código se divide en distintas “páginas” que realizan diferentes funciones. A continuación, se explica de manera detallada cada página o conjunto de ellas:
Páginas 1334-1336:
ORBITAL INTEGRATIONyKEPPREP:Estas páginas configuran las rutinas para la integración orbital, un proceso clave en la navegación espacial. La rutina
KEPPREPparece preparar variables y realizar cálculos preliminares necesarios para la integración de las órbitas.Bancos de Memoria: El código usa diferentes bancos de memoria para almacenar datos específicos.
Cargas y Almacenamientos: Se cargan y almacenan valores en diferentes ubicaciones de memoria, que incluyen cálculos de varios físicos, como la raíz cuadrada de la constante gravitacional.
Páginas 1337:
ACCOMP:La rutina
ACCOMPcalcula los componentes de aceleración. Utiliza vectores de posición y velocidad, y realiza operaciones vectoriales como multiplicaciones y sumas.Carga de Vectores: Carga y almacena vectores de aceleración.
Normalización: Normaliza los vectores para los cálculos posteriores.
Páginas 1338-1340:
GAMCOMP:Esta subrutina calcula componentes específicos de la aceleración gravitacional (
GAMCOMP).Cálculo de la Aceleración: Realiza cálculos complejos para determinar la aceleración debido a la gravedad y otras fuerzas.
Normalización: Asegura que los valores calculados estén en un rango normalizado.
Página 1341:
OBLATE:La rutina
OBLATEcalcula la aceleración debido a la oblación terrestre (achatamiento de la Tierra en los polos).Cálculo de Componentes de Oblateness: Usa el vector de posición del vehículo y su distancia al centro de la Tierra para calcular la aceleración adicional debido a la forma oblata de la Tierra.
Ajustes y Sumas: Ajusta los valores de aceleración calculados y los suma a las aceleraciones existentes.
Página 1343:
COMTERMyCOSPHIE:Estas secciones manejan cálculos adicionales y ajustes específicos relacionados con los efectos del oblateness.
- Cálculos de Términos Adicionales: Calcula y ajusta términos adicionales necesarios para la precisión en la integración orbital.
Páginas 1344-1345:
TIMESTEPyRECTEST:Estas rutinas gestionan los pasos de tiempo en la integración y verifican si se necesita una rectificación en la órbita calculada.
Verificaciones y Ajustes: Verifica condiciones específicas que podrían requerir ajustes en la órbita calculada.
Integración: Realiza la integración de la órbita utilizando pasos de tiempo específicos.
Página 1346:
ORIGCHNG:La rutina
ORIGCHNGmaneja los cambios de origen, es decir, cuando el sistema de referencia necesita ser ajustado debido a cambios significativos en la posición o velocidad.- Ajustes de Origen: Ajusta el sistema de referencia y recalcula los vectores de posición y velocidad en relación con el nuevo origen.
Página 1347:
RECTIFY:La subrutina
RECTIFYestablece una nueva órbita cónica cuando se detectan cambios significativos.Reestablecimiento de Órbita: Establece una nueva órbita cónica basada en los cálculos actuales de posición y velocidad.
Reinicialización: Reinicializa las variables y prepara el sistema para la siguiente etapa de integración.
Código de ensamblador:
TVCEXECUTIVE.arg
TVCEXECUTIVEes una rutina crítica del AGC que se encarga de gestionar y actualizar el sistema de control de actitud y navegación (TVC) del Módulo de Comando. Esta rutina se ejecuta a intervalos regulares de 0.5 segundos y realiza varias tareas esenciales:Preparación de Datos de Control:
Actualización de
Roll DAP: Se prepara elDAP(Data Access Processor) para el control del roll del módulo con los datos actuales.Actualización del
FDAI Needle: Se actualiza la aguja del Indicador de Actitud de Vuelo (FDAI) con el error de control de actitud del roll.Actualización del
Phase Plane: Se prepara el plano de fase del roll para el errorOGA(Error de Guía de Actitud).
Actualización de Necesidades y Datos:
Actualización de
Needles: Llama a una subrutina que actualiza los indicadores de actitud.Actualización de
Masa: Actualiza la masa del vehículo y, por ende, los datos de inercia.Actualización de
Ganancias: Actualiza las ganancias de control de actitud enpitch(elevación),yaw(guía) yroll, basándose en los datos de masa actualizados.
Corrección y Reajustes:
Corrección de Un Solo Disparo: Realiza ajustes únicos en el bucle
TMC(Throttle Maneuver Control) poco después de la ignición.Corrección Repetitiva: Ejecuta correcciones repetitivas para el bucle
TMCdespués de la corrección de un solo disparo.
Llamadas y Secuencia de Ejecución:
TVCEXECes llamado como una tarea en la lista de espera porTVCINIT4y por sí mismo a intervalos de 0.5 segundos.Verificación de Terminación: El código primero verifica si debe terminarse, usando un chequeo de bits en la palabra de bandera (
FLAGWRD6).Preparación de Datos: Luego prepara diversos datos y actualiza los indicadores y sistemas necesarios.
Actualización y Manejo de Errores:
Preparación del
DAP: Actualiza elDAPy otros componentes con los errores actuales y los datos de control.Actualización de
Needles: Llama a una subrutina para actualizar los indicadores de actitud.
Manejo de Ganancias y Correcciones:
Chequeo del Estado del Motor: Verifica si el motor está encendido para decidir si se deben actualizar las ganancias y la masa.
Actualización de Ganancias y Masa: Realiza ajustes basados en el estado actual del motor y actualiza las ganancias y datos de masa.
Correcciones de Un Solo Disparo y Repetitivas:
Chequeo de Tiempo: Verifica el tiempo para decidir cuándo realizar una corrección de un solo disparo o una corrección repetitiva.
Ajustes y Correcciones: Realiza correcciones según sea necesario, basándose en el estado de las correcciones anteriores.
Subrutinas Importantes:
NEEDLER: Actualiza los indicadores de actitud (needles).MASSPROP: Actualiza la masa y las propiedades relacionadas.IBNKCALL: Llama a una subrutina de banco de instrucciones para realizar operaciones específicas.
Salidas y Variables:
ROLL DAP,FDAI Needle, yPhase Plane: Se actualizan con los valores más recientes para el control del roll.- Ganancias Variables: Se ajustan para el
pitch,yawyrollbasados en los datos más recientes. - Correcciones de Ángulo de Motor: Se ajustan los ángulos de trim del motor y otros parámetros relevantes.
Código de ensamblador:
Influencia en Futuras Misiones Espaciales

Innovaciones en Navegación y Control Espacial
El AGC revolucionó la forma en que se realizaban las maniobras espaciales. Su capacidad para realizar cálculos complejos y proporcionar orientación precisa permitió a las misiones Apollo realizar maniobras críticas con un grado de exactitud sin precedentes. Esta tecnología de control y navegación se convirtió en un estándar para la planificación de misiones espaciales posteriores, incluyendo la navegación interplanetaria. Las técnicas desarrolladas para el AGC se adaptaron y mejoraron para misiones espaciales posteriores, como las sondas Voyager y las misiones a Marte.
Desarrollo de Sistemas de Control de Actitud
El AGC también sentó las bases para el desarrollo de sistemas avanzados de control de actitud en vehículos espaciales. Su sistema de Control de Actitud y Navegación (CAN) se utilizó para mantener la orientación y trayectoria de la nave espacial, un principio que sigue siendo esencial en las naves espaciales modernas. Los algoritmos de control adaptativos y las técnicas de compensación de errores desarrolladas para el AGC se emplearon en las misiones de la Estación Espacial Internacional (EEI) y en los satélites actuales.
Influencia en la Exploración Robótica
Las tecnologías y metodologías desarrolladas para el AGC también influyeron en los sistemas de control de las sondas espaciales y los robots. Las primeras misiones espaciales robóticas, como las sondas Mariner y Pioneer, adoptaron técnicas de control basadas en las experiencias del AGC. La precisión en la navegación y el procesamiento de datos inspiraron avances en la robótica espacial, que ahora permite a los rovers explorar Marte y otras superficies planetarias con alta autonomía.
Implementación en el Diseño de Satélites
Los principios de diseño del AGC se incorporaron en los sistemas de control de satélites. La capacidad del AGC para realizar cálculos de manera eficiente y controlar sistemas críticos a bordo influyó en el diseño de satélites de comunicaciones y observación de la Tierra. Los satélites modernos utilizan técnicas de procesamiento similares para manejar sus operaciones, mantener la estabilidad y transmitir datos con precisión.
Impacto y Legado del programa Apollo

Pionero en la Informática Embebida
El AGC es reconocido como uno de los primeros ejemplos de informática embebida. Diseñado para realizar tareas específicas dentro de un sistema mayor, el AGC demostró la viabilidad de utilizar computadoras especializadas para realizar funciones críticas en tiempo real. Este concepto se ha expandido enormemente, y la informática embebida ahora se utiliza en una amplia gama de dispositivos, desde electrodomésticos hasta automóviles y sistemas de control industrial.
Avances en Arquitectura de Computadoras
La arquitectura del AGC fue revolucionaria en su tiempo. Utilizaba una arquitectura de palabra de
15 bitscon una memoria de solo64 KB, lo que fue extremadamente compacto en comparación con las computadoras de la época. El diseño del AGC, con su enfoque en la simplicidad y la eficiencia, influyó en la evolución de las arquitecturas de computadoras de sistemas embebidos y en la optimización de recursos en entornos de hardware limitados.Desarrollo de Software y Algoritmos
El desarrollo del software para el AGC, incluyendo su sistema operativo y sus algoritmos de control, fue un avance significativo en la programación de sistemas críticos. El AGC empleó el uso de programación en lenguaje ensamblador y técnicas avanzadas de gestión de interrupciones y prioridades. Estas prácticas sentaron las bases para el desarrollo de software en sistemas embebidos y en tiempo real.
Inspiración para Innovaciones Tecnológicas
El éxito del AGC inspiró a generaciones de ingenieros y científicos. La forma en que el AGC superó los desafíos técnicos de su época impulsó la investigación y el desarrollo en campos relacionados con la informática, la ingeniería de control y la electrónica. La narrativa de cómo un equipo pequeño y dedicado pudo lograr avances significativos en tecnología con recursos limitados sigue siendo una fuente de inspiración para la innovación y el ingenio en la ingeniería y la tecnología.
Legado en la Cultura Popular y la Educación
El AGC también ha tenido un impacto cultural significativo. Su papel en las misiones Apollo ha sido celebrado en numerosos documentales, películas y libros. Además, el estudio del AGC y su código fuente se ha convertido en una herramienta educativa valiosa para enseñar sobre la historia de la informática, el diseño de sistemas embebidos y la ingeniería espacial.
Contribuciones a la Arquitectura de Redes y Comunicaciones
Aunque no directamente, el AGC influyó en el desarrollo de las redes de comunicaciones. La necesidad de transmitir datos entre la nave espacial y el control de misión en la Tierra inspiró avances en las técnicas de comunicación espacial y en la forma en que se gestionan las redes de datos en sistemas críticos.
Conclusión

La misión Apollo 11 fue un logro monumental en la historia de la humanidad, siendo el primer aterrizaje del hombre en la Luna el 20 de julio de 1969.
Un componente esencial para este éxito fue el Apollo Guidance Computer (AGC), uno de los primeros ordenadores digitales embarcados. Este dispositivo permitió manejar las complejidades del vuelo espacial con una eficiencia y fiabilidad extraordinarias para su época. Su diseño compacto y su capacidad para ejecutar múltiples tareas a través de una interfaz intuitiva demostraron la importancia de una buena interacción entre el hombre y la máquina.
El desarrollo del AGC y la misión Apollo 11 fueron ejemplos sobresalientes de colaboración interdisciplinaria, donde ingenieros, científicos, programadores y astronautas trabajaron juntos bajo la coordinación de la NASA.
Los avances tecnológicos y los conocimientos adquiridos durante esta misión han dejado un legado duradero en la exploración espacial y en la tecnología informática. Las lecciones aprendidas siguen influyendo en las misiones espaciales actuales.
El éxito de Apollo 11 y el papel crucial del AGC continúan inspirando a nuevas generaciones de científicos y entusiastas del espacio, recordándonos la capacidad humana para superar límites y alcanzar nuevas fronteras mediante la innovación y el trabajo en equipo.
Espero que os haya gustado leer el artículo tanto como a mi hacerlo. ¡Gracias por leer!
Webgrafía
The Apollo Guidance Computer: Architecture and Operation
https://github.com/chrislgarry/Apollo-11
http://www.ibiblio.org/apollo/#gsc.tab=0
https://www.nasa.gov/history/alsj/main.html
https://ntrs.nasa.gov/citations/19880069935
https://www.nasa.gov/history/alsj/alsj-LMdocs.html
https://www.nasa.gov/the-apollo-program/
https://hackaday.com/tag/apollo-guidance-computer/
https://en.wikipedia.org/wiki/Apollo_Guidance_Computer
http://www.righto.com/2019/09/a-computer-built-from-nor-gates-inside.html